MARS
Machina Arte Robotum Simulans
Contact person:
MARS is a cross-platform simulation and visualisation tool created for robotics research. It consists of a core framework containing all main simulation components, a GUI (based on Qt), 3D visualization (using OSG) and a physics engine (based on ODE).
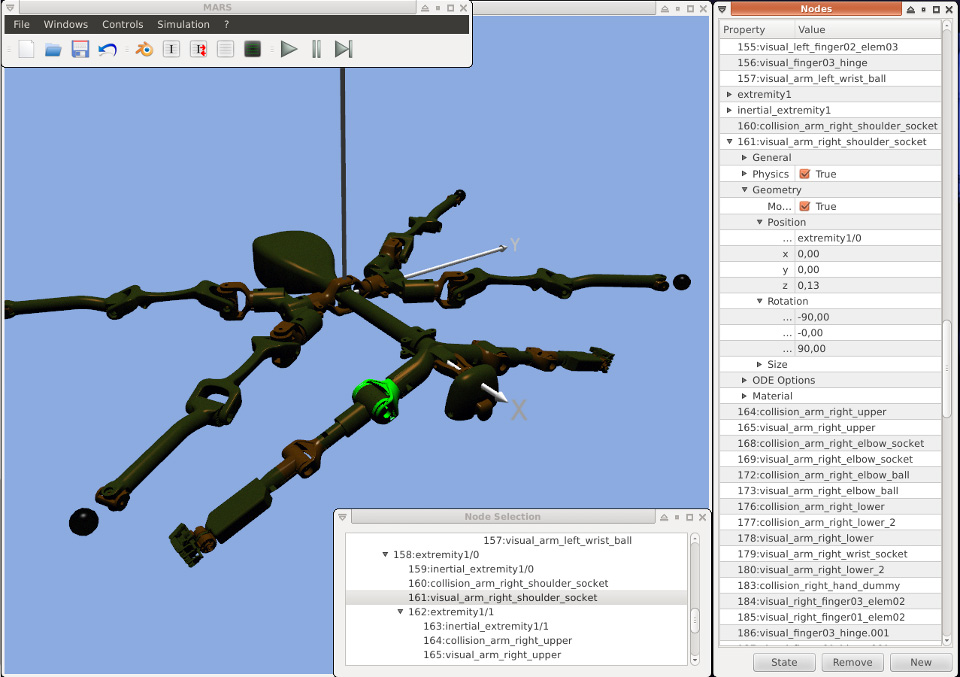
MARS is designed in a modular manner and can be used very flexibly, e.g. by running the physics simulation without visualization and GUI. It is possible to extend MARS writing your own plugins and many plugins introducing various functionality such as HUDs or custom ground reaction forces already exist - and it's easy to write your own.
| Website: | https://github.com/rock-simulation/mars |
| Keywords: | Simulation, Visualisierung |
| Status: | active |
| Operating system: | Linux, Mac OS, Windows |
| Programming languages: | C++ |
| Licence: | LGPL3 |
| Ownership: | This software was developed by the DFKI as well as by the Robotics Research Group and the University of Bremen and is being further developed under this responsibility. For questions and suggestions, please refer to the contact persons. |
Software description
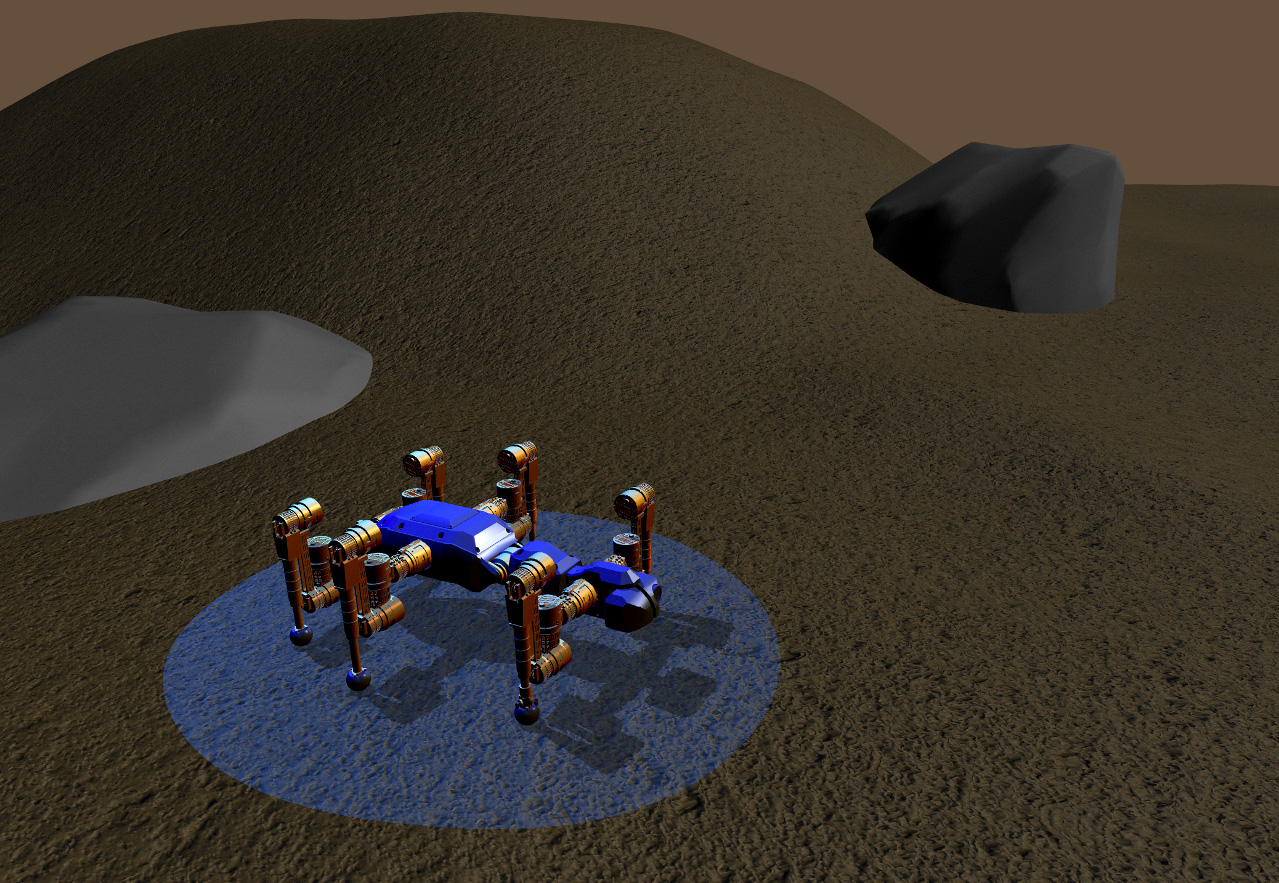
MARS is a cross-platform simulation and visualisation tool created for robotics research. It consists of a core framework containing all main simulation components, a GUI (based on Qt), 3D visualization (using OSG) and a physics engine (based on ODE).
MARS is designed in a modular manner and can be used very flexibly, e.g. by running the physics simulation without visualization and GUI. It is possible to extend MARS writing your own plugins and many plugins introducing various functionality such as HUDs or custom ground reaction forces already exist - and it's easy to write your own.