COROMA
Cognitively enhanced robot for flexible manufacturing of metal and composite parts

The goal of the COROMA project is to develop a cognitively enhanced robot that can execute multiple tasks for the manufacturing of metal and composite parts. COROMA will therefore provide the flexibility that European metalworking and advanced material manufacturing companies require to compete in the rapidly evolving global market. The main output of COROMA project will be a modular robotic system that will perform a multitude of different manufacturing tasks in an autonomous way to adapt to the production requirements. It will be able to move around and navigate in a factory, perform its tasks in dynamic environments, handle various tools with its dexterous gripper, and continuously adapt and improve its performance. The DFKI RIC is responsible for the development of lifelong learning and knowledge sharing methods.
| Duration: | 01.10.2016 till 30.09.2019 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | European Commission |
| Grant number: | H2020-IND-CE-2016-17/H2020-FOF-2016 723853 |
| Partner: | IDEKO S COOP (Spain), The University of Sheffield (United Kingdom), Universite De Nantes (France), Kungliga Tekniska Hoegskolan (Sweden), Staubli Faverges SCA (France), IT+Robotics SRL (Italy), Convergent Information Technologies GmBH (Austria), BA Systemes SAS (France), The Shadow Robot Company Limited (United Kingdom), Soraluce S. Coop. (Spain), Europe Technologies SAS (France), Equipos Nucleares SA (Spain), SA SPBI (France), Aciturri Metallic Parts SL (Spain), DIN Deutsches Institut Fuer Normung E.V. (Germany) |
| Application Field: | Logistics, Production and Consumer |
| Related Projects: |
FourByThree
Highly customizable robotic solutions for effective and safe human robot collaboration in manufacturing applications
(12.2014-
11.2017)
|
| Related Robots: |
COMPI
Compliant Robot Arm
|
| Related Software: |
BOLeRo
Behavior Optimization and Learning for Robots
|

Project details
Manufacturing is one of the strongest motors of the European economy. Although highly successful, the European manufacturing sector is suffering from the global competition of emerging economies and thus the importance of manufacturing in the EU has been steadily declining, from 18.5% of total GDP in the year 2000 to 15.1% in the year 2013. In 2012, the European Commission set the objective to recover the European manufacturing industry and reverse the downward trend reaching a 20% of the EU GDP by 2020, stimulating the introduction of new technologies.
Currently, industrial robots are widely used in repetitive manufacturing operations. The automotive industry, the first and largest robot user in the world, is a paradigm of this situation. Robots are employed in different positions along the automobile manufacturing chain, but there is limited flexibility regarding each robot's possible uses since these robots have been designed and implemented to optimally perform certain task.
More flexible robotic manufacturing systems will be able to perform tasks that cannot be automized at the moment because of their variability and dynamics. The robotic system that will be developed in COROMA will be capable of performing drilling, trimming, deburring, polishing, sanding, non-destructive inspection, and adaptive fixturing operations in application domains (see Figure 1), where mobility and adaptation to dynamic environments is required. Using a simple interface the robot will receive basic commands that require a minimum programming effort from the human operator. The robot will autonomously navigate in the workshop and will automatically perceive the manufacturing scene and locate the part that must be manufactured and even handle some of the required tools. Learning from previous experiences during displacement, tool grasping, part localisation and the manufacturing process itself, the robot will improve its performance. It will be able to interact with other machines in the shop floor and to work on a part even while other manufacturing operations are being performed by these other machines. Safe human-robot and machine-robot collaborations will be paramount and the robot will automatically react to the presence of both humans and other machines. The modularity of the COROMA robot will permit to customize it to meet specific requirements from different manufacturing companies. These challenges require a project consortium where the latest robotic technologies meet knowledge from manufacturing experts, including both industry and academia. The COROMA project consortium presents a perfect balance between manufacturing and robotics sectors' players.
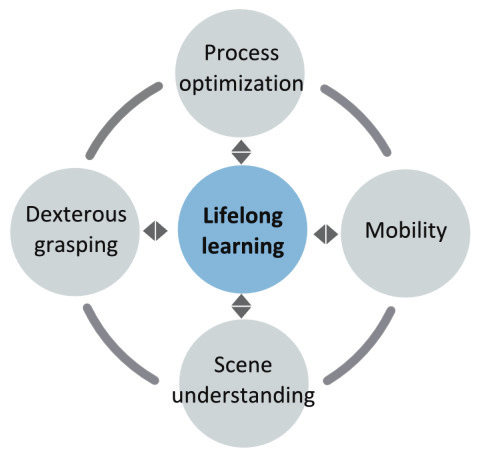
In COROMA, the DFKI RIC will develop a lifelong learning and knowledge sharing system. A test environment will be set up and a demonstrator for the learning methods will be developed, which will solve one of the tasks that are in the focus of COROMA project. During the project, imitation learning and lifelong learning methods will be implemented to learn from demonstration (e.g. by kinesthetic teaching or teleoperation) and continuously improve the behavior of the manufacturing system. An extensive evaluation will be conducted to test adaption to changing conditions, e.g. malfunctions of the system or changing objects. The system will leverage knowledge obtained by systems with different capabilities and morphologies that work on similar tasks. The learning and knowledge sharing system will be connected to all modules that enhance the autonomy of robots which will be developed in this project (see Figure 2). Furthermore, the developed system will be able to generalize its behavior over different but similar tasks so that the workpieces can vary e.g. in size and shape.