
Advanced AI - Interaction & Learning
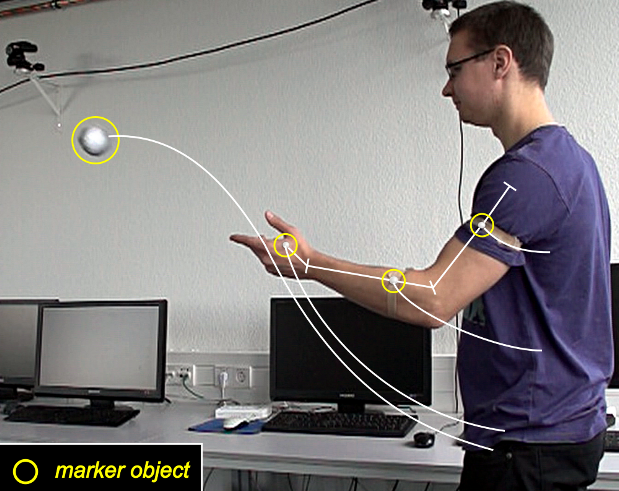
The goal of the "Interaction & Learning" team is to develop methods and approaches that enable machines to learn from the interaction between humans and machines or from the interaction between machines. The Machines can be either robotic systems or synthetic agents that interact with their counterparts in simulated and real environments. Based on the developed approaches, autonomous robots and synthetic agents that operate for extended periods of time in a complex environment with other systems or humans should be able to continuously learn. Through the interaction that underlies learning, robots can not only improve their behavior, but also flexibly adapt to different requirements in a team (with other machines and/or humans). This enables sustainable collaboration, making optimal use of the different capabilities of the team members, as well as the exchange of knowledge and skills. The focus of human-machine interaction is on observing, analyzing, and modeling human behaviors that are important for interaction in order to create a better understanding of how humans interact with other humans, machines, and their environment. These insights will be used to make the interaction between humans and robotic systems more agile, natural, and safe, and to enable largely autonomous and self-adaptive interaction in multi-robotic constellations. To better understand human interaction, behavioral data from different modalities are considered, such as motion data, images/video sequences, EEG, EMG, speech, or facial expressions.
The team is developing new learning methods that will allow autonomous robots to learn complex behaviors based on simple, generalizable behavioral primitives in order to learn from the interaction itself. In the case of human-machine interaction, the behavior of a robot can be adapted from the interaction in such a way that it becomes more predictable for the human, which also increases the acceptance of the system as an interaction partner. The predictability of the robot to the human is in turn linked to the predictability of the human to the system, which has an important impact on the safety of the human-robot interaction. In the case of machine-machine interaction, extensive optimization potentials arise in the context of machine modeling and the cooperative and competitive solution behaviors for complex, structured as well as unstructured problem domains in robotic interaction. Furthermore, the team is developing and improving other artificial intelligence and machine learning approaches to recognize and model the parts of human behavior that are important for interaction. In this way, adaptable cognitive models for long-term human-system interaction can be created, which can be applied in collaboration with other scientific teams in different scenarios.
Team lead: Dr.-Ing. Rebecca Adam
Deputy: Dr. rer. nat. Lisa Gutzeit