")


Applied AI - Space
As humans, we are interested in the exploration and utilization of space for both commercial and scientific reasons. Satellites orbit the Earth to provide weather data and enable communication around the world. Experiments are performed on board of the International Space Station in the absence of gravity. We investigate samples from planets hoping to improve our understanding of how our solar system and universe emerged, and hoping to find evidence for extraterrestrial life. However, human access to space is still very difficult, and astronaut missions are linked to high risks and financial costs.
Therefore, robots play a crucial role for all tasks that arise in space, such as the construction and maintenance of large structures and satellites in the Earth’s orbit, or the sampling on planetary surfaces. At the same time, these tasks set high demands on such robotic systems. With regard to mechatronics, those systems have to withstand and function under harsh operating conditions, such as imposed during transport from Earth into space, during landing on other planets, or while working in vacuum or in the absence of gravity for a defined time period. The further away from Earth the robots are operating, the more their communication is affected by time delay. While robots can be controlled via Teleoperation while still in orbit, this is not possible when they have covered longer distances. This is why such systems need to be able to independently perceive their situation and surroundings by sensors and artificial intelligence. This enables them to make informed decisions, and develop plans, which they can then put into action in a controlled manner.
The application-oriented team "Space" focuses on system design and AI based control methods for robots considering the challenges of the specific mission, and different operation concepts for ground control. Applications range from on-orbit-servicing to surface exploration. Many of the technologies that the team develops can be of benefit for applications on Earth too. For example, the use of robots in contaminated environments. Collaboration with other application-based teams ensures technology transfer, and provides a valuable addition to the team‘s research.
Focus:
- On-orbit operations:
- Satellite servicing
- Disposal of space debris
- Assembly of big structures
- Surface exploration
- Sampling on planetary surfaces
- Return of collected samples
- Multi-robot cooperation
- Multi-modal SLAM
- Construction, operation and maintenance of facilities and habitats
- Space stations (i.e. ISS)
- Moon stations (i.e. Moon Village)
- Tele-operation
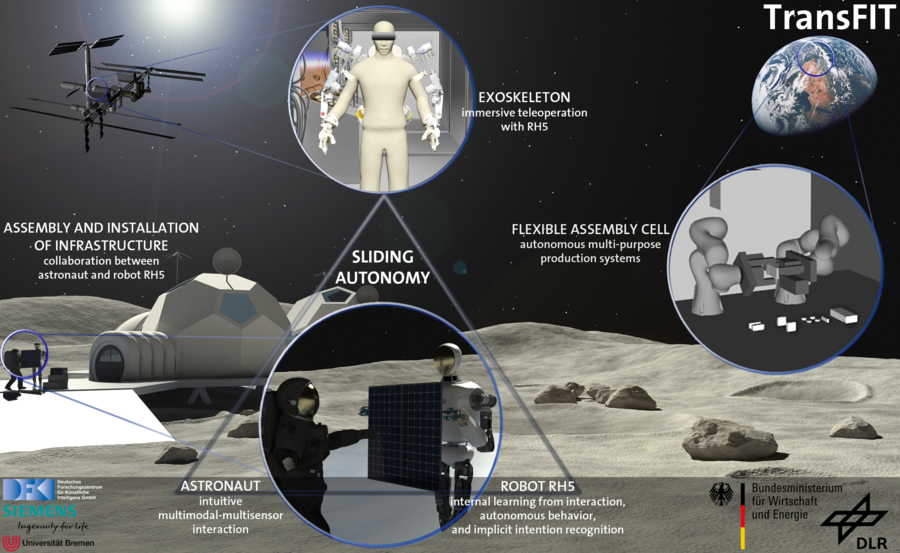
- Astronaut-Robot Cooperation