
Advanced AI - Interaction & Learning
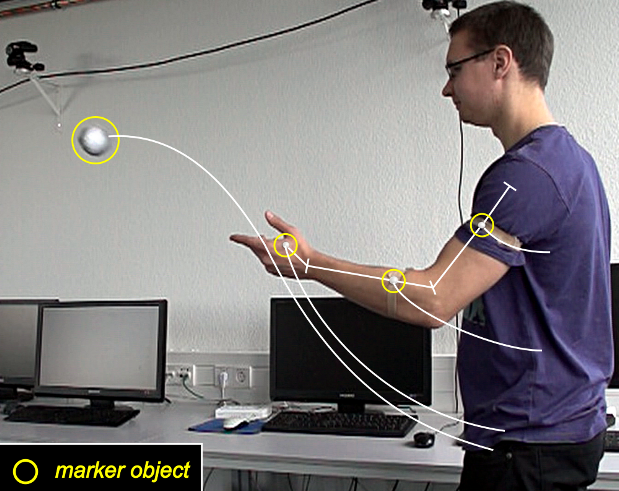
Ziel des Teams „Interaction & Learning“ ist es, Methoden und Ansätze zu entwickeln, die es Maschinen ermöglichen, aus der Interaktion zwischen Mensch und Maschine oder aus der Interaktion zwischen Maschinen zu lernen. Maschinen können dabei entweder robotische Systeme oder synthetische Agenten sein, die in simulierten und echten Umgebungen mit ihren Pendants in Interaktion treten. Dank dieser Ansätze sollen autonome Roboter und synthetische Agenten, die über längere Zeit in einer komplexen Umgebung mit anderen Systemen oder Menschen agieren, fortwährend hinzulernen können. Durch die Interaktion, die dem Lernen zugrunde liegt, können die Roboter nicht nur ihr Verhalten verbessern, sondern sich auch flexibel auf unterschiedliche Anforderungen im Team (mit anderen Maschinen und/oder Menschen) einstellen. Dies ermöglicht eine nachhaltige Zusammenarbeit unter optimaler Nutzung der unterschiedlichen Fähigkeiten der Teammitglieder sowie den Austausch von Wissen und Fähigkeiten. Der Schwerpunkt der Mensch-Maschine-Interaktion liegt dabei auf der Beobachtung, Analyse und Modellierung der für die Interaktion wichtigen Verhalten des Menschen, um ein besseres Verständnis darüber zu schaffen, wie Menschen mit anderen Menschen, Maschinen und ihrer Umgebung interagieren. Mit diesen Erkenntnissen soll die Interaktion zwischen Menschen und robotischen Systemen agiler, natürlicher und sicherer gestaltet, sowie eine weitestgehend autonome und selbstadaptive Interaktion in multirobotischen Konstellationen ermöglicht werden. Um die menschliche Interaktion besser zu verstehen, werden Verhaltensdaten verschiedener Modalitäten betrachtet, wie zum Beispiel Bewegungsdaten, Bilder/Videosequenzen, EEG, EMG, Sprache oder Gesichtsausdrücke.
Das Team entwickelt neue Lernverfahren, die es autonomen Robotern ermöglichen, auf Basis einfacher, generalisierbarer Verhaltensprimitiven komplexes Verhalten zu erlernen, um aus der Interaktion selbst lernen zu können. Im Falle der Mensch-Maschine-Interaktion lässt sich das Verhalten eines Roboters aus der Interaktion heraus so adaptieren, dass es für den Menschen vorhersagbarer wird, wodurch auch die Akzeptanz des Systems als Interaktionspartner erhöht wird. Die Prognostizierbarkeit des Roboters für den Menschen ist wiederum an die Vorhersagbarkeit des Menschen für das System gekoppelt, die einen wichtigen Einfluss auf die Sicherheit der Mensch-Roboter-Interaktion hat. Im Fall der Maschine-Maschine-Interaktion ergeben sich umfängliche Optimierungspotentiale im Rahmen der maschinellen Modellbildung und den kooperativen und konkurrierenden Lösungsverhalten für komplexe, strukturierte wie auch unstrukturierte Problemfelder in der robotischen Interaktion. Weiterhin entwickelt und verbessert das Team weitere Ansätze der künstlichen Intelligenz und des maschinellen Lernens, um die für die Interaktion wichtigen Teile des menschlichen Verhaltens zu erkennen und zu modellieren. So lassen sich adaptierbare, kognitive Modelle für die langfristige Interaktion zwischen Mensch und System erstellen, welche in Zusammenarbeit mit anderen wissenschaftlichen Teams in unterschiedlichen Szenarien Anwendung finden.
Teamleitung: Dr.-Ing. Rebecca Adam
Stellvertretung: Dr. rer. nat. Lisa Gutzeit