Neuigkeiten beim Robotics Innovation Center



Willkommen
Das Robotics Innovation Center (RIC) zählt zum Bremer Standort des Deutschen Forschungszentrums für Künstliche Intelligenz GmbH (DFKI). Hier entwickeln Wissenschaftlerinnen und Wissenschaftler unter Leitung von Prof. Dr. Dr. h.c. Frank Kirchner mobile Robotersysteme, die an Land, zu Wasser, in der Luft und im Weltraum für komplexe Aufgaben eingesetzt werden. Dabei kooperiert das RIC eng mit der Arbeitsgruppe Robotik der Universität Bremen.
Das DFKI mit Sitz in Kaiserslautern, Saarbrücken, Bremen und Niedersachsen, Laboren in Berlin und Darmstadt sowie Außenstellen in Lübeck und Trier ist auf dem Gebiet innovativer Softwaretechnologien auf der Basis von Methoden der Künstlichen Intelligenz die führende Forschungseinrichtung in Deutschland.
Weitere Informationen gibt es hier.
Neueste Projekte

Erprobung einer neuartigen Technologie zum Roboterarm-geführten Unterwasserschweißen in den Bremischen Häfen
Unterwasserrobotik
Multifunktionelle Schnittstelle und hybrides Tether mit Künstlicher Intelligenz für zuverlässige multi-robotische…
Weltraumrobotik


Neueste Robotersysteme

Modularer 6-Rad-Geländerover für autonome Missionen
Agrarrobotik |
SAR- & Sicherheitsrobotik |
Weltraumrobotik


KRATOS - Integrations Studie
Elektromobilität |
Logistik, Produktion und Consumer |
SAR- & Sicherheitsrobotik

Assistenz- und Rehabilitationssysteme |
Logistik, Produktion und Consumer |
Weltraumrobotik
Neueste Publikationen
Neueste Videos
MODKOM: Toolbox mit modularen Komponenten zur Demonstration rekonfigurierbarer Weltraumroboter
Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Das Video zeigt die Demonstration, die autonomes Andocken, die Neukonfiguration des Rovers und den Einsatz der Nutzlast im Rahmen eines umfassenderen Missionskontexts umfasst.
RoLand: Erdbeerpflückroboter SHIVAA mit verbesserter Pflückrate

Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Das Video dokumentiert die aktuellen Fortschritte bei der Pflückgeschwindigkeit des Shiva-Roboters beim Pflücken von Erdbeeren. Es zeigt zunächst den bisherigen Stand, dann die Weiterentwicklung und schließlich den Feldversuch.
MODKOM: Vibrationstest der Z-Achse von Prototypen des DFKI beim ZARM

Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Um Komponenten auf die Lasten eines Raketenstarts zu testen, werden diese im Vorhinein Vibrationstests unterzogen. Im Video sind Teile der Vibrationstests für die Prototypen der Robotergelenke mit Sinuslasten in Richtung der Z-Achse zu sehen. Auf Basis der Erkenntnisse aus diesen Tests konnte das mechanische Design optimiert und die finale Raumfahrtvariante des DFKI-X2D entwickelt werden. (Video: Jonas Eisenmenger, DFKI)
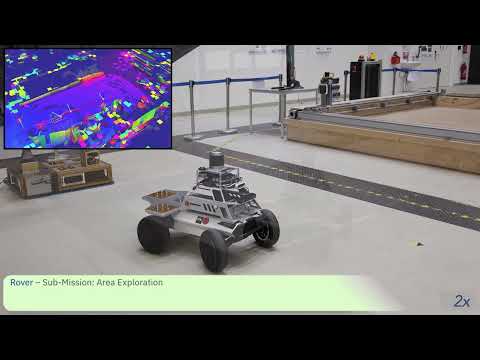
RealAIGym: 2. KI-Olympiade mit Wettbewerb
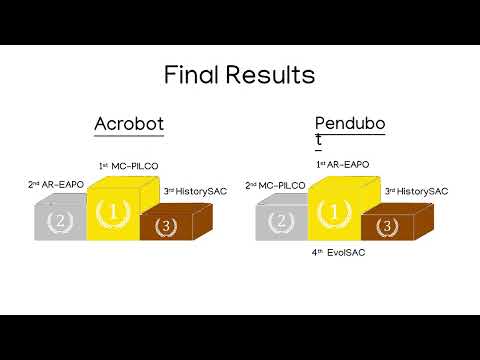
Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Verstärkendes Lernen für robuste athletische Intelligenz: Erkenntnisse aus den zweiten KI-Olympiaden mit dem RealAIGym-Wettbewerb. Autoren: Felix Wiebe, Niccolò Turcato, Alberto Dalla Libera, Jean Seong Bjorn Choe, Bumkyu Choi, Tim Lukas Faust, Habib Maraqten, Erfan Aghadavoodi, Marco Cali, Alberto Sinigaglia, Giulio Giacomuzzo, Ruggero Carli, Diego Romeres, Jong-kook Kim, Gian Antonio Susto, Shubham Vyas, Dennis Mronga, Boris Belousov, Jan Peters, Frank Kirchner, and Shivesh Kumar
Parallelübertragungsbewusstes Co-Design
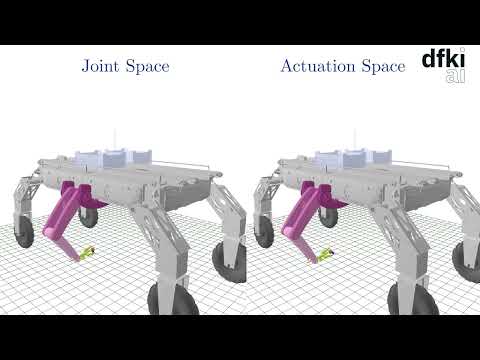
Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Verbesserung der Manipulatorleistung durch Optimierung des Aktuatorraums. Authors: Rohit Kumar, Melya Boukheddimi, Dennis Mronga, Shivesh Kumar, and Frank Kirchner
HARTU: UC2b – Demo zur Automobilmontage

Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Demonstration von im HARTU-Projekt entwickelten Robotiklösungen für die Automobilfertigung. Durch kinästhetisches Teachen und Gesten lernt der Roboter neue Aufgaben, passt sich Produktvarianten an und reproduziert Bewegungen adaptiv und kraftsensitiv.