HyRoDyn
Hybrid Robot Dynamics

| Schlüsselwörter: | Hybridroboter |
| Status: | aktiv |
| Betriebssystem: | Linux |
| Programmiersprachen: | C++, Python, Ruby |
| Eigentumsrechte: | Diese Software wurde vom DFKI sowie von der Arbeitsgruppe Robotik der Universität Bremen entwickelt und wird unter dieser Verantwortung weiterentwickelt. Bei Fragen und Anregungen wenden sie sich an die Ansprechpartner. |
Softwarebeschreibung
Parallelmechanismen werden zunehmend als modulare Subsystemeinheiten in verschiedenen Robotern und Mensch-Maschine-Schnittstellen eingesetzt, da sie eine höhere Steifigkeit, ein besseres Verhältnis von Nutzlast zu Gewicht und bessere dynamische Eigenschaften aufweisen. Dies führt zu seriellparallelen hybriden Robotersystemen, die aufgrund des Vorhandenseins verschiedener geschlossener Regelkreise schwer zu modellieren und zu steuern sind. Die meisten modellbasierten kinematischen und dynamischen Modellierungstools lösen die Beschränkungen des Schleifenschlusses numerisch und können daher unter Ineffizienz und Genauigkeitsproblemen leiden. Außerdem nutzen sie die Modularität des Roboterdesigns nicht aus. Außerdem können solche Systeme variabel beweglich sein, verschiedene Montagearten aufweisen und redundante Bedingungen für die Bewegungsgleichungen stellen. Daher ist es für Kinematikforscher interessant, die analytischen Lösungen für geometrische Probleme im Zusammenhang mit einer bestimmten Art von PM zu untersuchen, und ihre Bedeutung gegenüber numerischen Lösungen ist unbestreitbar. Dieses domänenspezifische Wissen ist jedoch bei der Entwicklung modellbasierter Kinematik- und Dynamiksoftware häufig unterrepräsentiert.
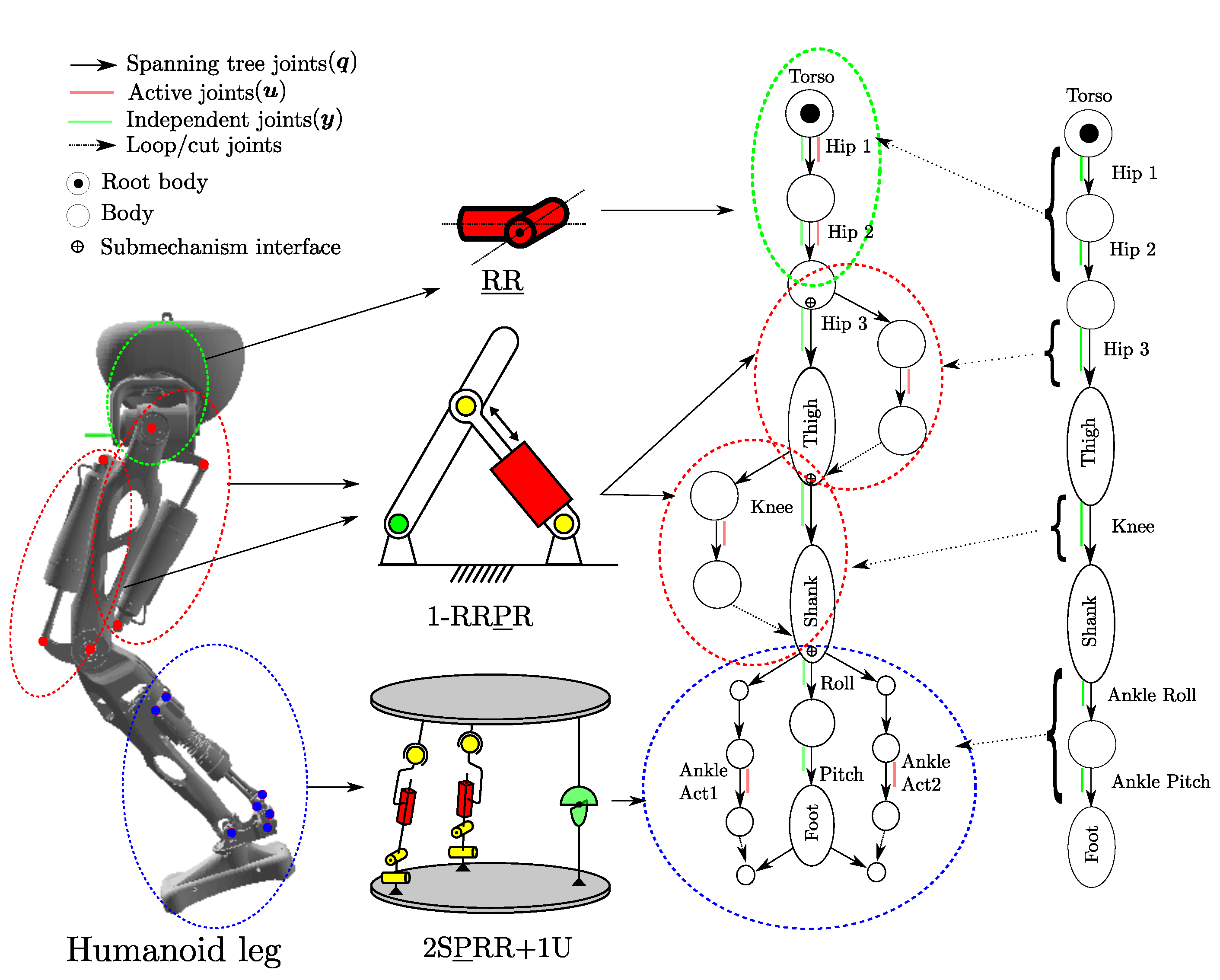
Hybrid Robot Dynamics (HyRoDyn) ist eine modulare, in C++ geschriebene Software-Workbench zur Lösung der Kinematik und Dynamik hochkomplexer serienparalleler Hybridroboter. Die Grundidee von HyRoDyn besteht darin, die geschlossenen Lösungen für die Schleifenschlussbedingungen in einer konfigurierbaren Mechanismenbibliothek zu speichern, die durch ihren Typ identifiziert wird (z. B. 1-RRPR, 2SPU+1U, 2SPRR+1U, 6-UPS). Basierend auf den in einem Hybridroboter definierten Teilmechanismen kann HyRoDyn die Schleifenschlussfunktion des Gesamtsystems auf automatisierte Weise modular zusammenstellen. Der resultierende Schleifenschluss-Jacobianer hat eine blockdiagonale Struktur, die bei der Berechnung verschiedener vorwärts- und rückwärtsgerichteter Kinematik- und Dynamik-Algorithmen genutzt werden kann. HyRoDyn ist in C++ implementiert und verwendet rekursive O(n)-Mehrkörperdynamik-Algorithmen für baumartige Systeme aus der Rigid Body Dynamics Library (RBDL), die auf den Algorithmen von Featherstone basieren. Gegenwärtig sind geschlossene Lösungen für Mechanismen wie 1-RRPR, 2-SPU+1U, 2-SPRR+1U, 6-RUS, 6-UPS und Parallelogrammketten in den Untermechanismenbibliotheken verfügbar. Um Zeit und menschliches Fachwissen zu sparen, wurde das Tool um einen numerischen Ansatz für parallele Mechanismen erweitert, die nicht in Teilmechanismenbibliotheken verfügbar sind. HyRoDyn kann verwendet werden, um die Kinematik und Dynamik eines beliebigen serienparallelen Hybridroboters analytisch zu lösen. Die Aktion des Roboters kann beliebig gewählt werden.
Die Eingabe für HyRoDyn ist eine SMURF-Datei, die mit einem Blender-basierten visuellen Editor namens Phobos erstellt werden kann. Die Verwendung eines visuellen Editors macht es einfach, die parallelen Teilmechanismen eines Roboters zu annotieren und zu hochkomplexen Robotermodellen zusammenzusetzen. Darüber hinaus wurde HyRoDyn in die Robot Construction Kit (RoCK)-Middleware als Orogenkomponente integriert, die sowohl vorwärts als auch rückwärts gerichtete Abbildungen zwischen dem unabhängigen Gelenkraum des Roboters und seinem Betätigungsraum auf Positions-, Geschwindigkeits-, Beschleunigungs- und Kraftebene liefert. Die HyRoDyn-Orogenkomponente kann sowohl für die Simulation als auch für die Echtzeitsteuerung komplexer seriell-paralleler hybrider Robotersysteme verwendet werden.

Videos
M-RoCK+VeryHuman: Whole-Body Control of Series-Parallel Hybrid Robots
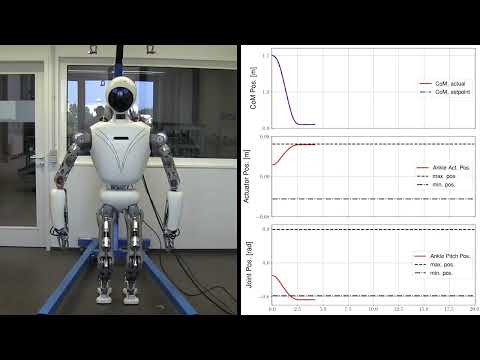
Das Video illustriert die Ergebnisse der Arbeit Dennis Mronga, Shivesh Kumar, Frank Kirchner: "Whole-Body Control of Series-Parallel Hybrid Robots", Accepted for Publication: IEEE International Conference on Robotics and Automation (ICRA), 23.5.-27.5.2022, Philadelphia, 2022.
RH5: Motion Capture State Feedback für die Echtzeitsteuerung eines humanoiden Roboters
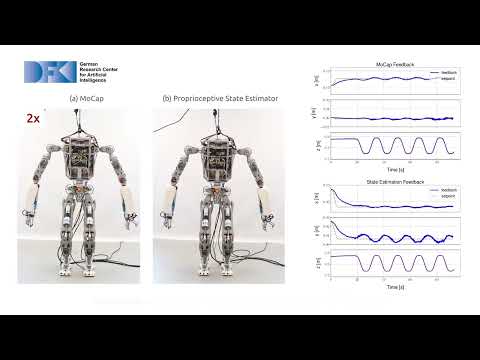
Das Video veranschaulicht die Ergebnisse der Veröffentlichung Mihaela Popescu, Dennis Mronga, Ivan Bergonzani, Shivesh Kumar, Frank Kirchner: "Experimental Investigations into Using Motion Capture State Feedback for Real-Time Control of a Humanoid Robot", zur Veröffentlichung angenommen: MDPI Sensors Journal, Sonderausgabe "Advanced Sensors Technologies Applied in Mobile Robot", 2022.
D-Rock: HyRoDyn - Inverse Dynamik basierend auf einer unabhängigen Gelenkraumbewegung

D-Rock: HyRoDyn Phobos XEC

Workflow vom Modellieren über das Simulieren bis zur Echtzeitkontrolle bei einer seriell-parallelen Hybridkomposition eines menschenähnlichen Beins.
Publikationen
Modular and Hybrid Numerical-Analytical Approach - A Case Study on Improving Computational Efficiency for Series-Parallel Hybrid Robots
Rohit Kumar, Shivesh Kumar, Andreas Mueller, Frank Kirchner
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (IROS-2022), 23.10.-27.10.2022, Kyoto, IEEE, Nov/2022.
An Analytical and Modular Software Workbench for Solving Kinematics and Dynamics of Series-Parallel Hybrid Robots
Shivesh Kumar, Andreas Mueller
In 43rd Mechanisms and Robotics Conference, Parts A and B, (IDETC/CIE-2019), 18.8.-21.8.2019, Anaheim, CA, ASME, Oct/2019.
HyRoDyn: A Modular Software Framework for Solving Analytical Kinematics and Dynamics of Series-Parallel Hybrid Robots
Shivesh Kumar, Kai Alexander von Szadkowski, Andreas Müller, Frank Kirchner
In Poster at 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS-2018), 01.10.-05.10.2018, Madrid, IEEE/RSJ, series IROS Poster proceedings, pages 1-1, Oct/2018.