RH5 Manus
Humanoider Roboter als Assistenzsystem in menschoptimierter Umgebung

Technische Details


Systembeschreibung
Der humanoide Roboter RH5 Manus ist eine Weiterentwicklung des Roboters RH5, der für den Einsatz in direkter menschlicher Umgebung z.B. auf einer zukünftigen Mondstation, entwickelt wurde. Sowohl der Oberkörper als auch die Arme und der Kopf des Roboters, welcher als Sensorträger für die visuelle und akustische Wahrnehmung des Systems dient, wurden für diese Version des Roboters überarbeitet. Neben dem autonomen und teilautonomen Einsatz soll sich der Roboter zudem mithilfe eines Exoskeletts teleoperieren lassen. Die visuelle Wahrnehmung und die wirkenden Kräfte und Drehmomente des Roboters werden dabei mittels Methoden der virtuellen Realität der steuernden Person zur Verfügung gestellt. Es besteht ein zu den Beinen des Roboters RH5 kompatibles Interface.
Die hybride serielle und parallele Designarchitektur wurde im Sinne einer Gewichtoptimierung bei gleichzeitiger Vergrößerung der Steifigkeit weiter entwickelt. Für eine verbesserte Dynamik wurden die Antriebskomponenten der Arme optimiert und Massen in Richtung der Schultergelenke verlagert. Das System wurde mit modular aufgebauten Greifern ausgestattet welche wahlweise in 3 Variationen als 2-, 3- und 4-Finger-Greifer zur Verfügung stehen und mit wenig Aufwand am Roboter getauscht werden können. Die Greifer sind selbst adaptiv und mit einer haptischen Sensorik ausgestattet.
Videos
M-RoCK+VeryHuman: Whole-Body Control of Series-Parallel Hybrid Robots
Das Video illustriert die Ergebnisse der Arbeit Dennis Mronga, Shivesh Kumar, Frank Kirchner: "Whole-Body Control of Series-Parallel Hybrid Robots", Accepted for Publication: IEEE International Conference on Robotics and Automation (ICRA), 23.5.-27.5.2022, Philadelphia, 2022.
RH5 Manus: Hintergründe der Robotertanzgenerierung basierend auf musikanalysegesteuerter Trajektorienoptimierung

RH5 Manus: Robotertanzgenerierung basierend auf musikanalysegesteuerter Trajektorienoptimierung

Musikalisches Tanzen ist ein allgegenwärtiges Phänomen in der menschlichen Gesellschaft. Die Fähigkeit von Robotern zu tanzen hat das Potenzial, die Koexistenz von Mensch und Roboter akzeptabler zu machen. Daher haben tanzende Roboter in den letzten Jahren ein erhebliches Forschungsinteresse geweckt. In diesem Beitrag stellen wir eine neuartige Formalisierung des Robotertanzes als Planung und Steuerung von optimal getakteten Aktionen vor, die auf
Taktzeiten und zusätzlichen, aus der Musik extrahierten Merkmalen. Wir zeigen die Anwendung dieser Formulierung in drei verschiedenen Varianten: mit der Eingabe einer Choreografie durch einen menschlichen Experten, der Imitation einer vordefinierten Choreografie und der automatischen Generierung einer neuen Choreografie. Unsere Methode wurde an vier verschiedenen Musikstücken validiert, sowohl in der Simulation als auch an einem realen Roboter, dem humanoiden Oberkörperroboter RH5 Manus.
RH5 Manus: Humanoider Assistenzroboter für zukünftige Weltraummissionen

Der humanoide Roboter "RH5 Manus" wurde im Rahmen des "TransFIT"-Projekts als Assistenzroboter entwickelt, der in der direkten menschlichen Umgebung, zum Beispiel auf einer zukünftigen Mondstation, eingesetzt werden kann. Ziel war es, den Roboter mit den notwendigen Fähigkeiten auszustatten, um komplexe Montagearbeiten sowohl autonom, als auch in Kooperation mit Astronauten und teleoperiert durchzuführen. Ein weiterer Schwerpunkt des Projekts lag auf der Übertragung der entwickelten Technologien auf die industrielle Fertigung und Produktion. Das Video zeigt die mechanische Montage und die Inbetriebnahme des Roboters.
RH5 Manus: Vorstellung eines leistungsfähigen humanoiden Oberkörperdesigns für dynamische Bewegungen

Jüngste Studien deuten darauf hin, dass eine steife Struktur zusammen mit einer optimalen Massenverteilung die Schlüsseleigenschaften sind, um dynamische Bewegungen auszuführen, und dass parallele Designs einem Roboter diese Eigenschaften verleihen. In dieser Arbeit wird das neue Oberkörperdesign des humanoiden Roboters RH5, genannt RH5 Manus, mit seriell-parallelem Hybriddesign vorgestellt. Die neuen Konstruktionsentscheidungen ermöglichen es uns, dynamische Bewegungen auszuführen, einschließlich Aufgaben, die eine Nutzlast von 4 kg in jeder Hand erfordern,
und schnelle Box-Bewegungen. Die parallele Kinematik in Kombination mit einer seriellen Gesamtkette des Roboters ermöglicht uns eine hohe Krafterzeugung bei einem größeren Bewegungsbereich und einer geringen peripheren Trägheit. Der Roboter ist mit Kraft-Drehmoment-Sensoren, Stereokamera, Laserscannern, hochauflösenden Encodern usw. ausgestattet, die eine Interaktion mit dem Bediener und der Umgebung ermöglichen. Wir generieren verschiedene dynamische Bewegungen mit Hilfe von Bahnoptimierung und führen sie erfolgreich auf dem Roboter mit genauer Bahn- und Geschwindigkeitsverfolgung aus, wobei wir die Grenzen für Rotation, Geschwindigkeit und Drehmoment der Gelenke einhalten.
RH5: Motion Capture State Feedback für die Echtzeitsteuerung eines humanoiden Roboters
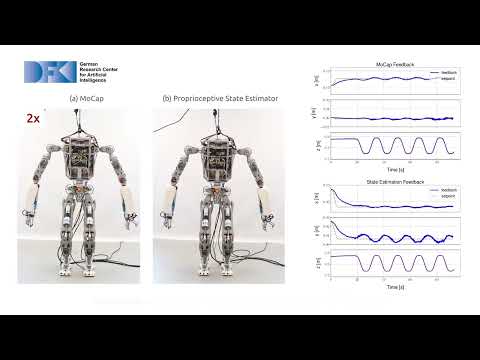
Das Video veranschaulicht die Ergebnisse der Veröffentlichung Mihaela Popescu, Dennis Mronga, Ivan Bergonzani, Shivesh Kumar, Frank Kirchner: "Experimental Investigations into Using Motion Capture State Feedback for Real-Time Control of a Humanoid Robot", zur Veröffentlichung angenommen: MDPI Sensors Journal, Sonderausgabe "Advanced Sensors Technologies Applied in Mobile Robot", 2022.
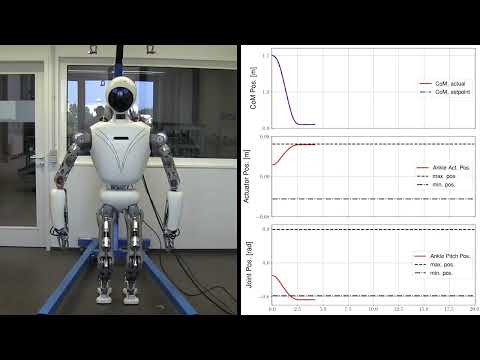
RH5: Entwurf, Analyse und Steuerung des Serien-Parallel-Hybridroboters RH5 Humanoid

In diesem Beitrag wird ein neuartiger seriell-paralleler Hybrid-Humanoid namens RH5 vorgestellt, der 2 m groß ist und nur 62,5 kg wiegt und in der Lage ist, schwere dynamische Aufgaben mit 5 kg Nutzlast in jeder Hand auszuführen. Die Analyse und Steuerung dieses Humanoiden wird mit einer Ganzkörper-Trajektorien-Optimierungstechnik durchgeführt, die auf differentieller dynamischer Programmierung (DDP) basiert. Zusätzlich stellen wir einen verbesserten kontaktstabilitätsabhängigen DDP-Algorithmus vor, der in der Lage ist, physikalisch konsistente Lauftrajektorien für den Humanoiden zu generieren, die über eine einfache PD-Positionskontrolle in einem Physiksimulator verfolgt werden können. Schließlich präsentieren wir erste experimentelle Ergebnisse mit dem humanoiden Roboter RH5.