Recupera REHA
Ganzkörper Exoskelett für die robotische Oberkörper-Assistenz

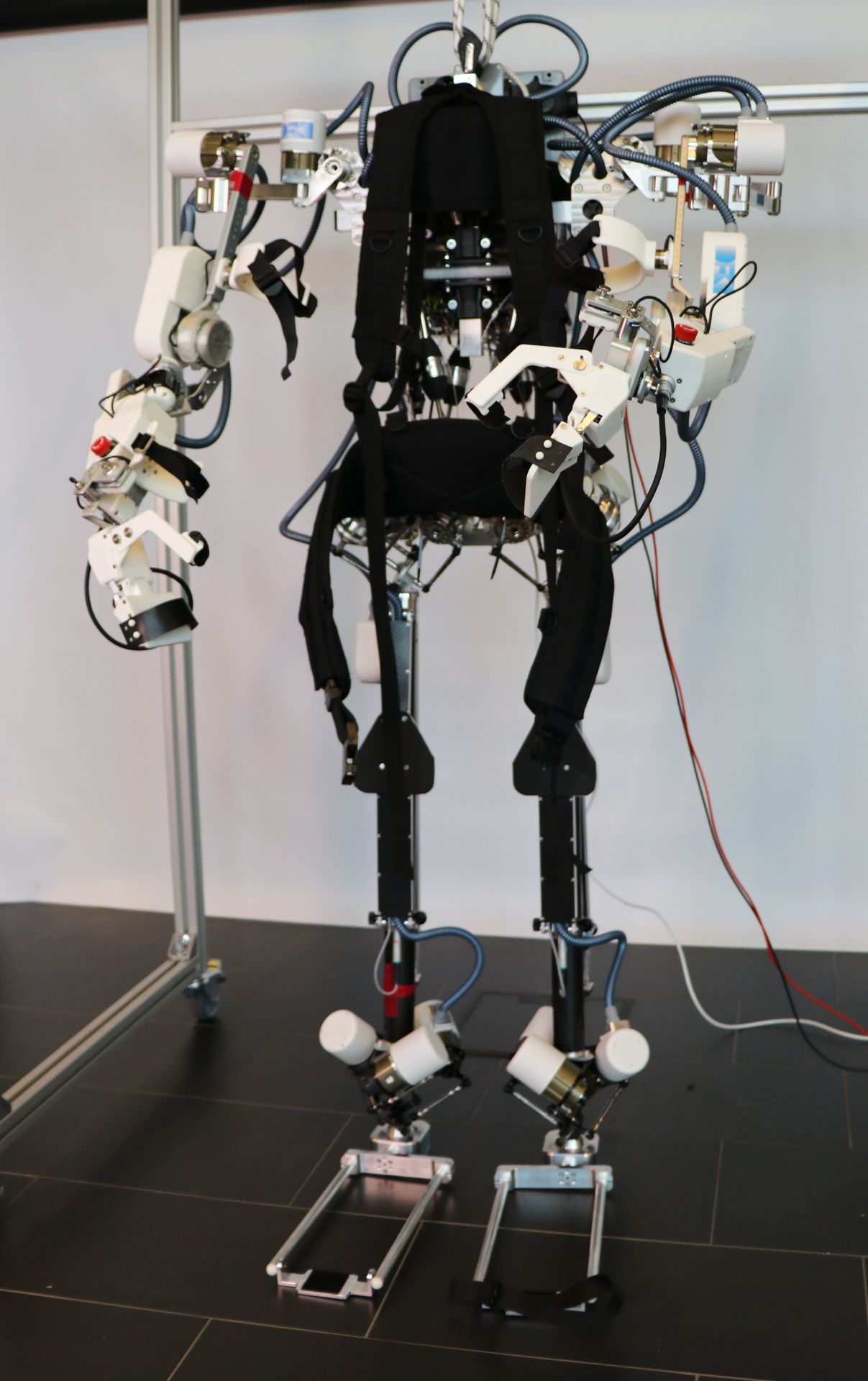
Das Projektziel von Recupera REHA ist die Entwicklung eines innovativen und mobilen Ganzkörper-Exoskeletts, sowie eines eigenständigen aktiven Teilsystems zur robotergestützten Rehabilitation von neurologischen Erkrankungen. Das selbsttragende Ganzkörper-Exoskelett soll kinematisch annähernd den gesamten Bewegungsraum des menschlichen Körpers erfassen und energieautark agieren können. Zum Aufbau des Systems werden neue Methoden zur Aktuation, Regelungstechnik und zum Leichtbau erarbeitet. Die mechatronischen Ansätze werden mit einem neuen System zur Online-Auswertung von EEG/EMG-Signalen kombiniert, um eine Einschätzung des Zustandes der bedienenden Person und eine mehrstufige Unterstützung der Regelung des Exoskeletts zu ermöglichen. Bei der Entwicklung des eigenständigen Teilsystems sollen die Neuerungen aus dem Ganzkörper-Exoskelett aufgegriffen und hinsichtlich verschiedener Ansätze der Therapie und Rehabilitation untersucht werden. Die enge Zusammenarbeit mit dem Verbundpartner rehaworks ermöglicht die Evaluierung der medizinischen Anwendbarkeit der projektierten Komponenten und eröffnet neue Perspektiven in der Entwicklung von prototypischen robotischen Rehabilitationsgeräten. Die Bestimmung der Leistungsfähigkeit und der Ergonomie der Systeme wird in einer anschließenden Evaluationsphase ermittelt. Zudem werden Kriterien einer Pilotstudie im Anwendungsszenario Oberkörperrehabilitation erarbeitet.

Projektdetails


Bidirektionale Mensch-Maschine Interaktion
Im Mittelpunkt dieses Teilaspekts steht die Entwicklung von schlüssigen Anwendungskonzepten und deren spezifischen Anforderungen für den Umgang mit Patienten im Kontext der motorischen Rehabilitation. Hierbei sollen sinnvolle Synergien zwischen Mensch und Maschine geschaffen werden, um die Verfahren und Arbeitsschritte in der Rehabilitation zu optimieren sowie für Patienten und Therapeuten erweiterte und innovative Therapieoptionen auf Basis neuer Technologien zu ermöglichen.
Entwicklung mechatronisches System
Aufgabe in diesem Bereich ist die Entwicklung eines inhärent sicheren Robotersystems. Diese Entwicklungsarbeit umfasst die Erstellung einer dem Menschen angepassten Kinematik, der Entwicklung geeigneter Antriebe, die Bereitstellung eines elektronischen Systems und die Integration der einzelnen Bestandteile zu einem Gesamtsystem. Parallel wird ein aktives Teilsystem aus den entwickelten Komponenten extrahiert und als eigenständiger Demonstrator aufgebaut.
Kinematik und Dynamik
Das Ziel, ein neuartiges Ganzkörper-Exoskelett aufzubauen, umfasst im Bereich der Kinematik und Dynamik das Lösen unterschiedlicher Aufgaben, sowie die Beantwortung von spezifischen Fragestellungen. Im Bezug auf die kinematischen Ketten des Systems betrifft dies beispielsweise die Auswahl geeigneter Gelenktypen oder die Länge von Strukturbauteilen im Zusammenspiel mit den menschlichen Gliedmaßen. In der erforderlichen dynamischen Synthese wird die korrekte Auslegung der benötigten Aktuatorstärken hinsichtlich der gegebenen Massen ermittelt. Unterstützend zu weiteren Teilaspekten und dem optimalen Betrieb des Exoskeletts werden weitergehende Fragestellungen bearbeitet, die sich z.B. mit der synchronen Auswertung von Bewegungs- und sensomotorischen Daten, der Beurteilung des Benutzerverhaltens und der Ansteuerung des Systems für einen individuellen Patienten befassen.
Adaptives Steuerungssystem
Ziel ist die Entwicklung einer hochmodularen, mehrstufigen Regelungsstruktur, welche eine dynamische Kontrolle des Exoskeletts ermöglicht. Die grundlegende Architektur der Regelung wird aus drei hierarchisch angeordneten Ebenen bestehen und über einzeln auswählbare, sowie variabel miteinander kombinierbare Module verfügen. Eine der Kernaufgaben ist hierbei die Entwicklung von assistiven Regelungsstrategien für die Rehabilitationsanwendung.
Biosignal-Integration
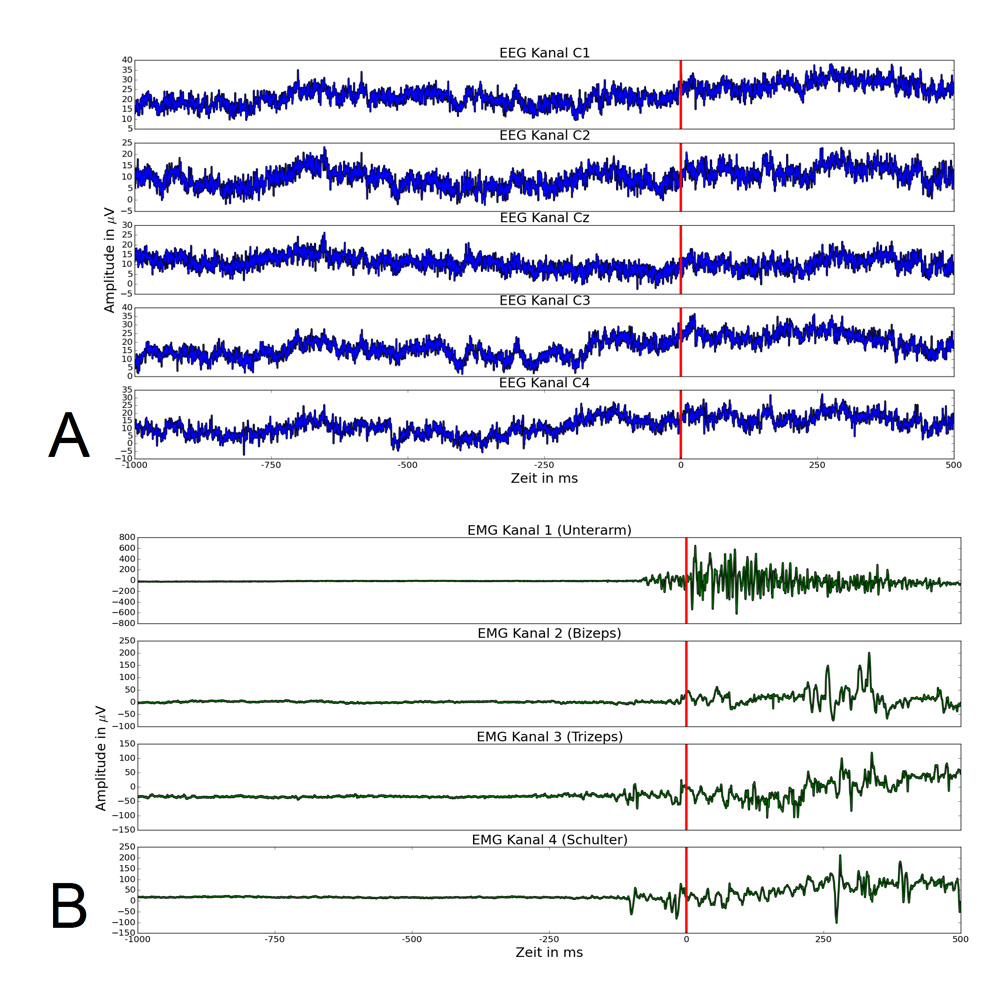
In diesem Bereich werden die Voraussetzungen geschaffen, elektroenzephalografische und elektromyografische Aktivität (EEG und EMG) mit dem Ansatz von embedded Brain Reading (siehe ein Video aus einer anderen Anwendung hier) in die robotorgestützte Rehabilitation einzubeziehen. Dabei ist geplant, dass die Biosignale als Zusatzelement der Exoskelett-Kontrolle eingesetzt werden, um eine optimale Anpassung an die Bedürfnisse der Patienten zu erreichen. Dies erfordert das Aufnehmen von EEG- und EMG-Daten und das Erarbeiten von neuen automatischen Verfahren zum Markieren und Auswerten der Daten im Kontext der angewandten Therapie. Ein weiterer Forschungsschwerpunkt ist die Generierung von Aktivitätsmodellen gesunder Probanden, um im Vergleich zu erkrankten Personen beispielsweise Rückschlüsse auf Rehabilitationsfortschritte ziehen zu können. Zur Analyse der EEG- und EMG-Daten, aber auch für die Untersuchung der Möglichkeiten zur Einbindung weiterer Daten vom robotischen System, wird die quelloffene Software pySPACE (Signal Processing And Classification Environment in Python) verwendet. pySPACE unterstützt sowohl die Generierung von Aktivitätsmodellen als auch die Anpassung des robotischen Systems an den Patienten. Es können zahlreiche Verfahren verglichen und optimiert und die Ergebnisse den Partnern vorgestellt werden. Dies beinhaltet auch die Anpassung der Verfahren zur Laufzeit. Erst nach einer Optimierung der Verfahren ist eine feste Einbettung des entwickelten Ansatzes in das Exoskelett möglich.
Eingebettete Datenverarbeitung
Um die für Anwendungen in der Rehabilitation notwendige Autonomie zu erreichen, müssen alle Berechnungen (Kinematik/Dynamik, Regelung, Biosignalverarbeitung) in einem in das Exoskelett eingebetteten System, durchgeführt werden. Um die dabei notwendige Rechenleistung gewährleisten zu können, und dennoch platz- und energiesparend zu sein, sollen FPGAs eingesetzt werden. Dadurch können spezialisierte Hardwarebeschleuniger die jeweiligen Berechnungen effizient und echtzeitfähig durchführen. Für die Implementierung der Hardwarebeschleuniger soll das Framework reSPACE (reconfigurable Signal Processing And Classification Environment) genutzt und erweitert werden, um auch komplexe Regelungs- und Kinematikberechnungen durchführen zu können.
Videos
Recupera REHA: Funktionsweise und Anwendung des Recupera REHA Teilsystems

Recupera REHA: Animation der Funktionsweise und Anwendung der Systeme

Recupera REHA: Therapeutisches Anwendungsbeispiel des Teilsystems bei einer Schlaganfallpatienten

Capio Exoskelett: Ansteuerung über Biosignale

Demonstration der Ansteuerung des Capio Exoskeletts über Biosignale: Das Exoskelett-System erfasst durch die Verarbeitung von Biosignalen die Bewegungsintention des Operators und führt eine zielgerichtete aktive Bewegung des rechten oder linken Arms aus. Hierbei wird mittels Eye-Tracker der Interaktionswunsch erfasst (Fixierung einer virtuellen Flasche), mittels elektroenzephalographischer Signale (EEG) die Bewegungsintention des linken bzw. rechten Arms ermittelt und durch elektromyographische Signale (EMG) die Bewegungsintention zusätzlich verifiziert.