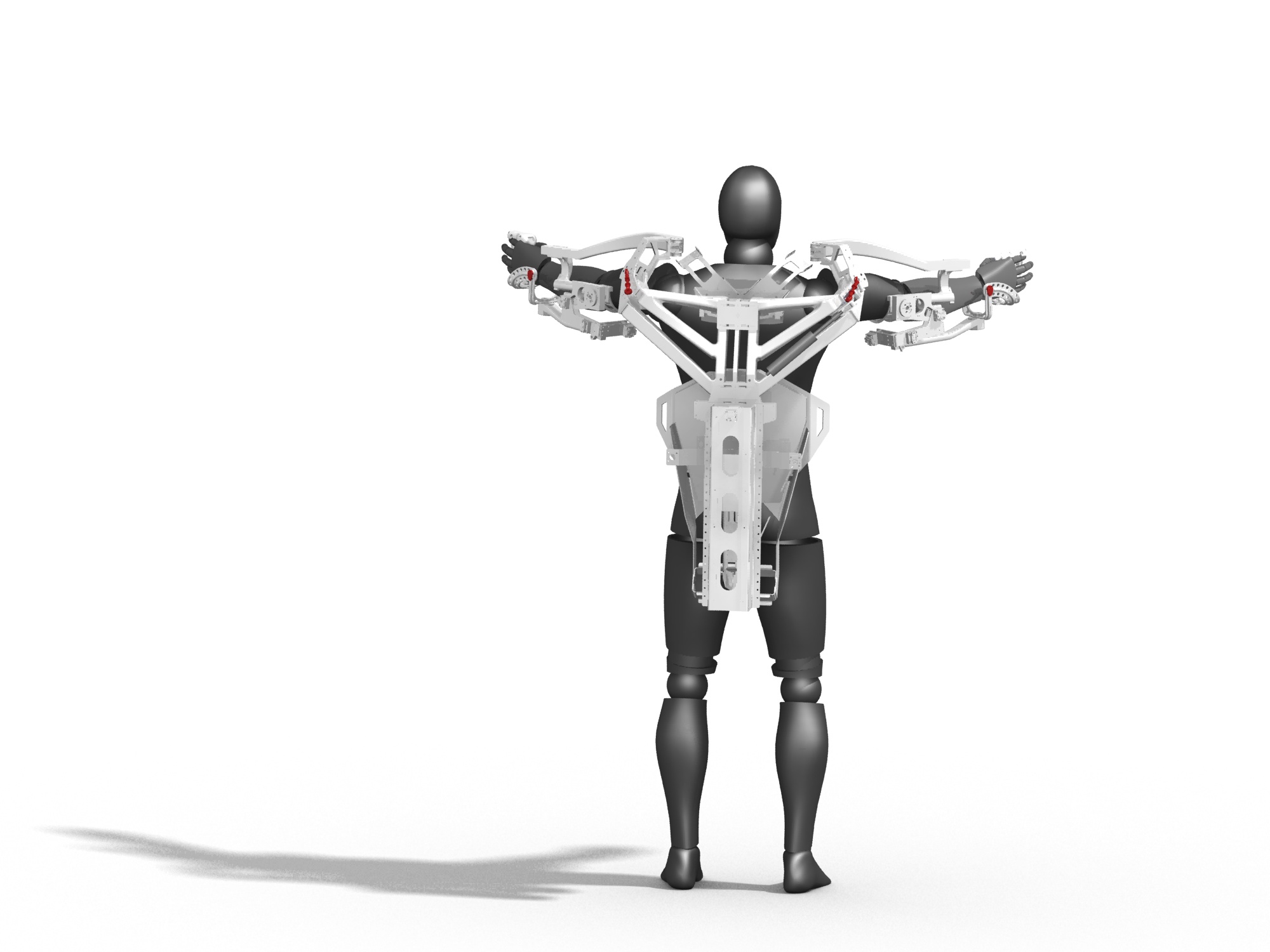
Exoskelett Passiv (CAPIO)
Oberkörper Mensch-Maschine-Interface für die Tele-Operation
")
Technische Details
Systembeschreibung
Ferngesteuerte Roboter
sind ein unverzichtbares Werkzeug bei der Exploration und Interaktion in für
den Menschen unzugänglichen Orten wie Tiefsee, Weltraum oder Gefahrenbereiche.
Die auszuführenden
Aufgaben im Kontext der
realen Umgebung sind
derartig komplex, dass der Roboter schwer von einem Operator gesteuert werden
kann, auch nicht mit Unterstützung der künstlichen Intelligenz.
Ein Exoskelett als
Mensch-Maschine-Interface ermöglicht eine dem Menschen entsprechende Interaktion
zwischen Roboter und Anwender. Das Exoskelett erfasst die Bewegungen des
menschlichen Körpers, überträgt diese auf das ferngesteuerte System und kann
zudem Kraftinformationen vom System wiederum auf den Menschen über ein
Haptisches Feedback zurückleiten.
Das Capio-Passive-Exoskelett
ist die kinematische Vorstudie des CAPIO-Exoskelttes basierend auf der Entwicklung
im VI-Bot-Projekt.
Innerhalb dieser Studie
wurden notwendige Aspekte wie Sicherheit und Ergonomie untersucht und eine
Kinematik entwickelt, die diesen Erfordernissen entspricht.
Die Konstruktion basiert
auf den Abmessungen eines 95 Perzentile männlichen Europäers. Und ist im Rücken, in den Schultern
und an den Armen auf diese Abmessungen anpassbar.
Das passive System ist
über fünf Kontaktstellen (Hände, Oberarme, Schultern und Hüfte) mit dem
menschlichen Körper verbunden und erfasst über die parallele kinematische
Struktur zum menschlichen Bewegungsapparat Posen bzw. Bewegungen der Arme und
des Torsos.
Die kinematische
Struktur umfasst acht Freiheitsgrade in den Armen und sechs Freiheitsgrade im
Rücken.
Die Freiheitsgrade des
Exoskelettes sind so ausgelegt und angeordnet, dass das Exoskelett passive der
menschlichen Bewegung folgen kann. Dies ist die Voraussetzung für die „Free
Running“ Funktion des aktiviven finalen CAPIO-Exoskelettes und eine wichtiger
Punkt im Hinblick auf Sicherheit und Handhabung des Systems.
Die erforderliche
Handhabung z. B. für das Ankleiden des Oberkörper-Exoskelettes
ist in einem „Open
Joint“ Konzept realisiert. In dem „Open Joint“ Konzept sind die entsprechenden
Gelenkachsen des Exoskelettes außerhalb des menschlichen Körpers angeordnet, so
dass die Kontaktstellen frei zugänglich sind und das System leicht angekleidet
werden kann.
Für den Komfort und den
Sitz ist das System zum Teil in den Gelenken über Federn Gewichtskompensiert.
Neben den passiven Gelenken des Exosekettes verfügt
das System über ein aktives Handinterface z.B. für die Kraftrückkopplung eines Ferngesteuertem Endeffektors.