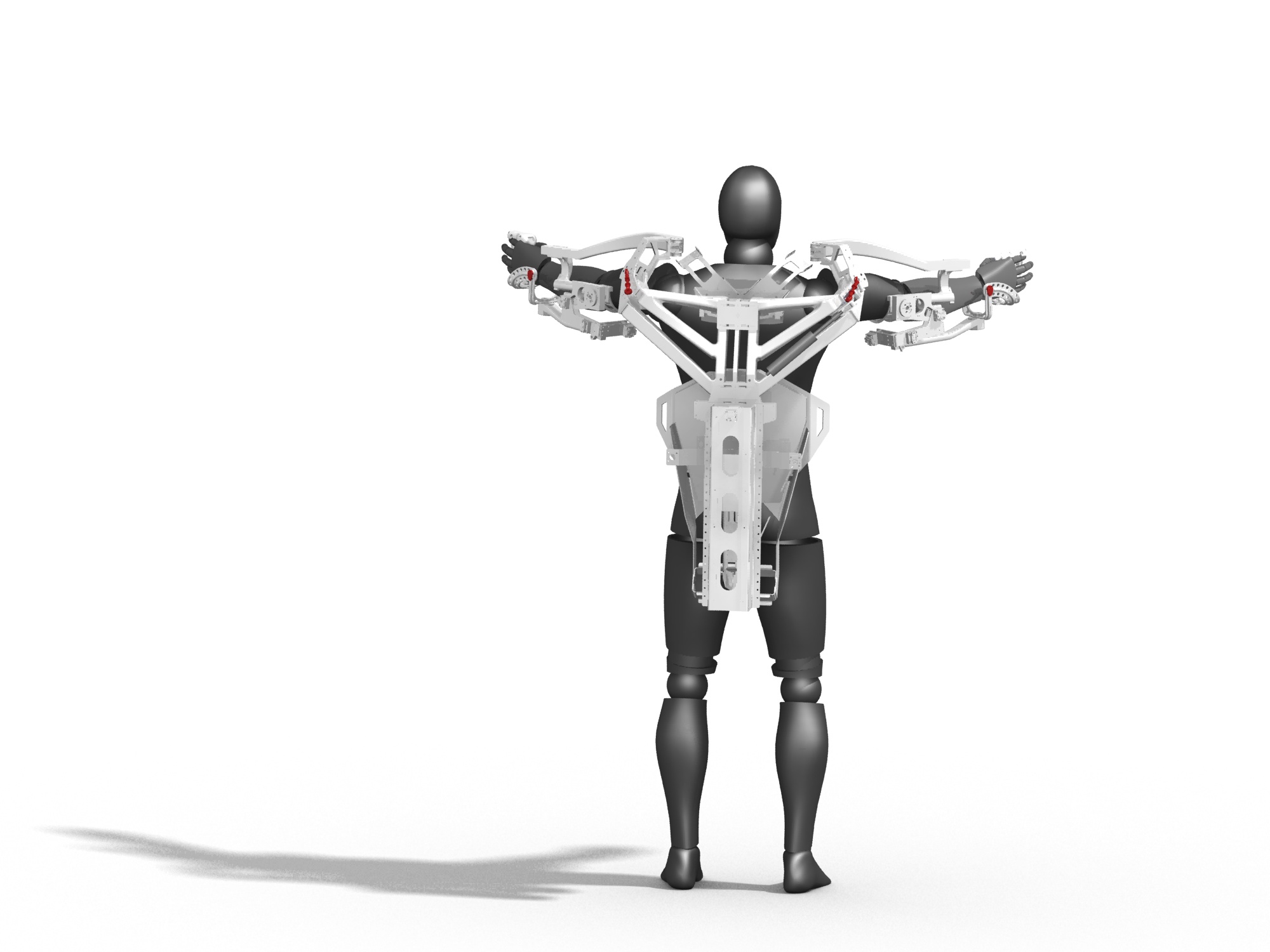
Exoskeleton Passive (CAPIO)
Upper body Human-Machine-Interface (HMI) for tele-operation
") Foto: Jan Albiez und Niels Will, DFKI
Foto: Jan Albiez und Niels Will, DFKI
Technical Details
System description
 Quelle: Steffen Schmidt, DFKI
Quelle: Steffen Schmidt, DFKI
Remote controlled robots are indispensable tools for exploration of and operation in hazardous environments. The systems, their action spaces, and their tasks have reached a level of complexity that makes it increasingly difficult for operators or even state-of-the-art artificial intelligence to control them. An exoskeleton is one example of a Human-Machine-Interface (HMI) facilitating realistic interaction between an operator and a robotic system. It partially captures the movement of the human body and maps it to commands the remote system is able to understand. Furthermore an Exoskeleton is able to transfer force information of the controlled system back to the user as haptic feedback.
The developed CAPIO-Passive-Exoskeleton is the kinematics pre study of the final upper body dual arm CAPIO-Exoskeleton based on the VI-Bot-Project. Within this study we evaluate necessary safety and usability aspects and developed the kinematic setup of the final CAPIO-Exoskeleton. The Design is based on a 95 percentile male European and is adjustable to this in the back, the shoulder and the upper arm.
The passive system is connected at the hands, arms, shoulder and the hip to the user. Motions and poses of the arms and torso are captured via the parallel kinematic structure (exoskeleton) to the human biomechanics system. The kinematic structure has eight joints for each arm and six joints for the back not considering the adjustable joints. The kinematic structure is designed to be non actuated the basis for the free running mode of the final system, an important feature for safety and usability of the exoskeleton.
The necessary handling for an upper body exoskeleton e.g. for dressing is realized with a “Open Joint” kinematic set-up. The Exoskeleton joint axis are outside the human body and the contact point are easy accessible.
For the comfort and the fitting in operation the system ins partially gravity compensated via springs in the joints. Furthermore the passive exoskeleton has an active hand interface e.g. due to control an end-effector with force feedback.