Capio
Dual-arm exoskeleton

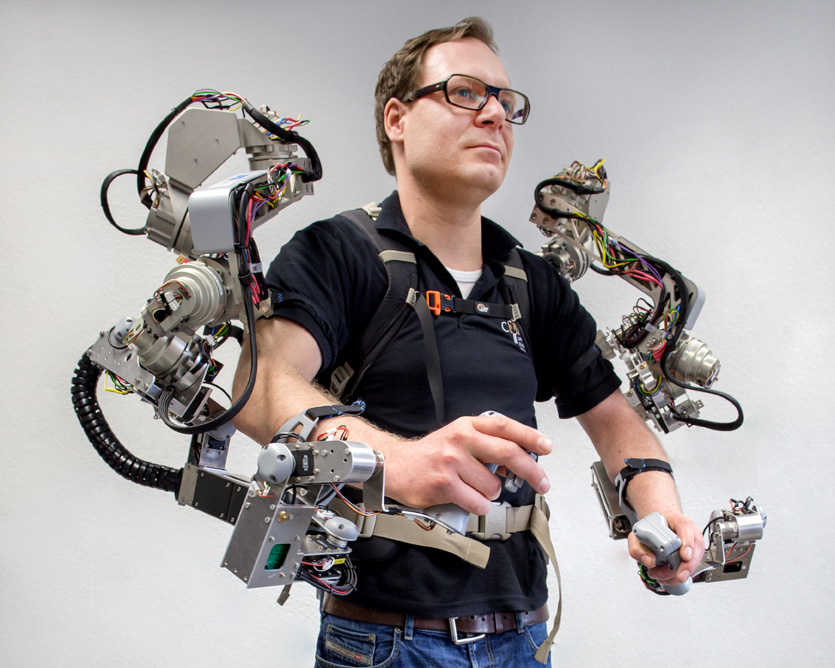
Capio develops a universal, wearable, lightweight upper-body dual-arm exoskeleton, primarily targeted at teleoperation tasks. A study concerning robotic rehabilitation will establish a basis for research activities in this area. Sensor information of the remote systems will be applied directly to the operator's body in real time through a feedback mechanism that relies on the actuated system.
| Duration: | 01.01.2011 till 31.12.2013 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | Federal Ministry of Education and Research |
| Grant number: | This project is funded by the German Federal Ministry of Education and Research (BMBF), grant no. 01IW10001 |
| Application Field: | Assistance- and Rehabilitation Systems |
| Related Projects: |
VI-Bot
Virtual Immersion for holistic feedback control of semi-autonomous robots
(01.2008-
12.2010)
IMMI
Intelligent Man-Machine Interface - Adaptive Brain-reading for assistive robotics
(05.2010-
04.2015)
|
| Related Software: |
CAD-2-SIM
Computer Aided Design To Simulation
|
Project details
Remote controlled robots are indispensable tools for exploration of and operation in hazardous environments. The systems, their action spaces, and their tasks have reached a level of complexity that makes it increasingly difficult for operators or even state-of-the-art artificial intelligence to control them.
An exoskeleton is one example of a Human-Machine Interface (HMI) facilitating realistic interaction between an operator and a robotic system. It partially captures the movement of the human body and maps it to commands the remote system is able to understand. Likewise, feedback generated by the remote system may give the operator the illusion of being part of the setting. Exoskeletons may also contribute to the developing application domain of robotic rehabilitation.
Based on the findings of the VI-Bot project, Capio aims at developing a universal, wearable, lightweight upper-body dual-arm exoskeleton applicable for teleoperation tasks. A study concerning robotic rehabilitation will establish a basis for research activities in this area. The design of the exoskeleton strongly benefits from the VI-Bot project but goes well beyond the current state of the art in mechatronics, control, and kinematic mapping, i.e. the process of mapping the user input to the actuatory capabilities of the target system. The material, design, and manufacturing processes for the exoskeleton are further optimised, adapted for the new application, and thereby brought to the next level concerning integration of sensory devices into flexible or rigid structure. Sensor information of the remote systems will be applied directly to the operator's body in real time through a feedback mechanism that relies on the actuated system. New approaches for controlling such a system, anticipating actions of either involved parties, and handling kinemantics and dynamics efficiently in real-time are indispensable for Capio.
Videos
Capio: Passive Exoskeleton

Demo showing the CAPIO passive Exoskeleton controlling AILA.
Capio Exoskeleton

Demonstration of the Capio active upper body exoskeleton in teleoperation scenarios.