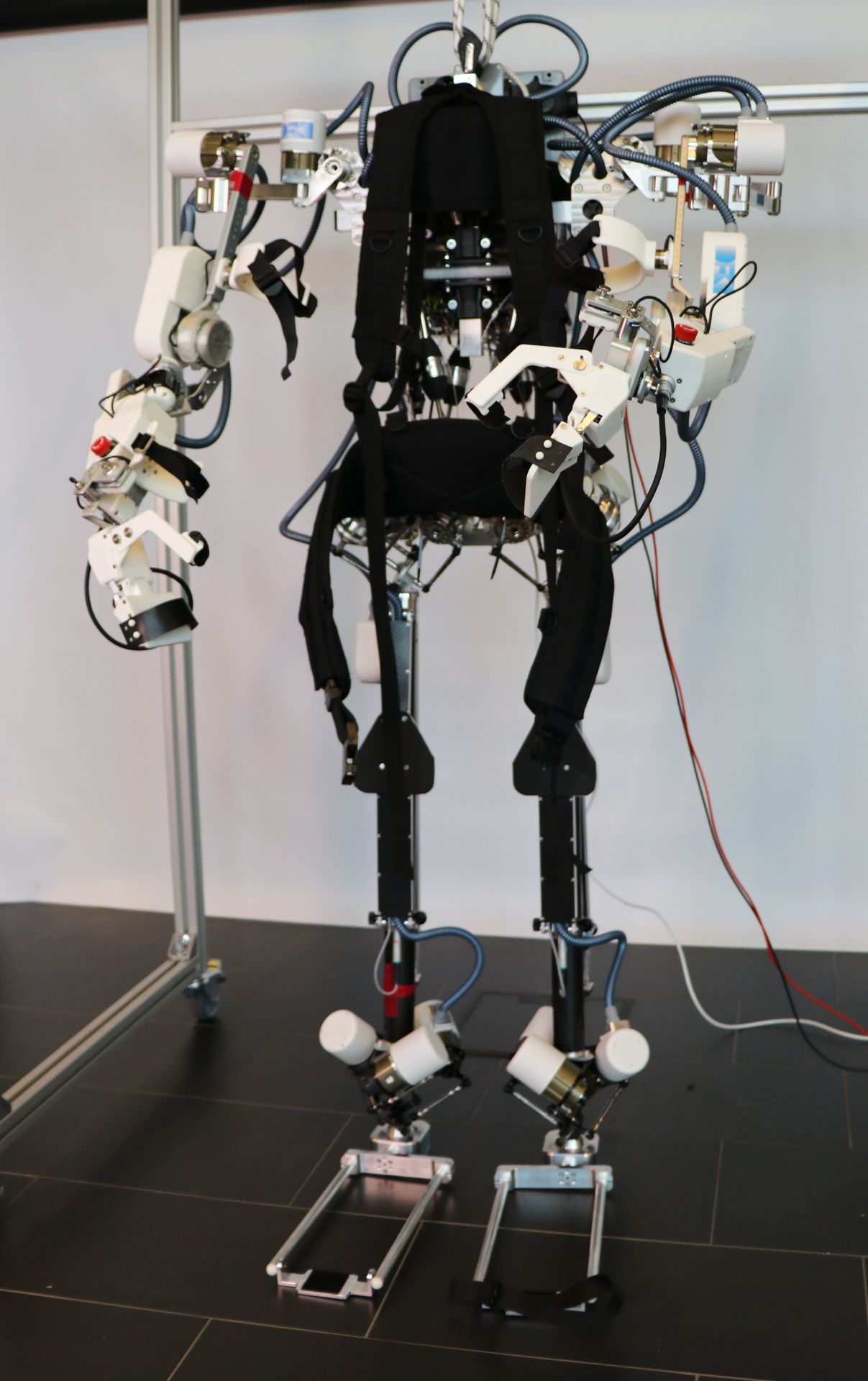
Recupera REHA
Full-body exoskeleton for upper body robotic assistance

The aim of Recupera REHA is the development of an innovative and mobile full-body exoskeleton, as well as and of an active subsystem as an independent unit for robot-assisted rehabilitation of neurological diseases. The full-body system is intended to capture the kinematics of the entire human body, to support itself, and to work power self-sufficient. New methods dealing with actuation, lightweight construction, and control engineering will be elaborated for the development of the system. The mechatronic approaches are combined with a new methods for online-evaluation of EEG/EMG signals, in order to allow an evaluation of the operating person’s condition and a multistage support of the exoskeleton’s control system. Innovations from the full-body system will be used to develop the independent unit and investigate fundamental principles and approaches for treatment and rehabilitation. The close cooperation with the joint project partner rehaworks allows to evaluate the medical suitability of the developed components. Further it opens up new perspectives for development of prototypical robotic rehabilitation devices. The performance and the ergonomics of the systems will be investigated in a subsequent evaluation phase. Finally, criteria for a pilot study in the field of upper body rehabilitation will be defined.

Project details


Bidirectional man-machine interaction
This specific aspect of the project is focused on the development of application concepts and their specific requirements for dealing with patients in the context of motor rehabilitation. The aim is to create synergies between man and machine in order to optimize processes and the workflow of rehabilitation, as well as to provide patients and therapists with advanced and innovative therapy options on the basis of this new technology.
Development of a mechatronic system
The task in this research field is the development of an intrinsically safe robotic system. This development work includes the creation of a kinematic structure adapted to the human being, the development of appropriate drives, and provision of an electronic system. These components are then assembled to an overall system and integrated into an additional independent system for upper body rehabilitation.
Kinematics and dynamics
With the aim of building a novel full-body exoskeleton, the specific work in kinematics and dynamics deals with solving different tasks: During the design phase of the exoskeleton, different aspects of the kinematic chain of the system are defined. This comprises the selection of joint types and the length of exoskeleton limbs. The dynamic synthesis deals with the evaluation of the masses in the system and the resulting forces needed from the actuators. In order to support additional aspects in the development and optimal operation of the exoskeleton, further issues are addressed, which deal with e.g. the synchronous evaluation of movement and sensomotoric data, the assessment of the users behavior and the patient dependent control of the system.
Adaptive control system
The aim is to develop a modular, multi-level control structure enabling a dynamic control of the exoskeleton. The basic architecture will consist of three hierarchical layers. The control system will feature selectable single control modules, which can be combined with each other in various ways. One of the core tasks is the development of assistive control strategies for rehabilitation purposes.
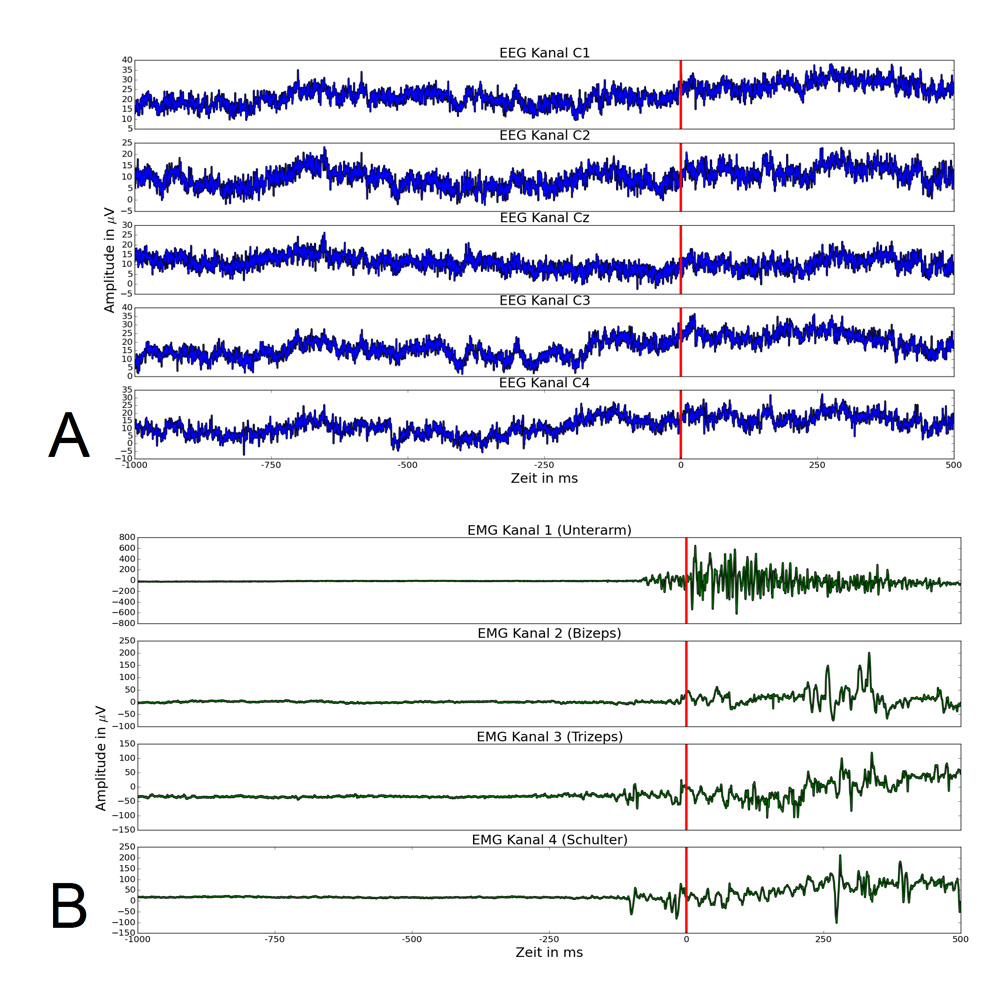
Biosignal integration
In this field of research, conditions are created to transfer electroencephalographic and electromyographic activity (EEG and EMG) by means of embedded Brain Reading (see a different application video here) into robot assisted rehabilitation. It is planned that the bio-signals are used as an additional element of the exoskeleton control in order to achieve an optimal adaptation to the patient’s needs. In particular this requires the acquisition of EEG and EMG signals and the development of new automatic procedures for labeling and evaluating the signals in the context of e.g. applied therapy. Further, activity models from healthy persons will be generated in order to compare them with activities of patients and in this way, e.g. analyze the rehabilitation progress. The open source software pySPACE (Signal Processing And Classification Environment written in Python) is used to analyze EEG and EMG data, but also to examine the potential of integrating further data from the robotic system. pySPACE supports the creation of activity models as well as the adaptation of the robotic system to the patient. Numerous processing algorithms can be compared and optimized and the results can be presented to the partners. This includes the adjustment of the processing during runtime. Only after the optimization step, it is possible to have a fixed embedding of the developed processing approach into the exoskeleton.
Embedded Data Processing
In order to achieve the autonomy that is required for rehabilitation applications, all processing (kinematics/dynamics, control, biosignal processing) has to be performed by a small computing system that is embedded into the exoskeleton itself. In order to provide a sufficient amount of computing power and still meet the strict requirements regarding physical space and power consumption, FPGAs will be used. The time-critical computations can then be performed by application specific hardware accelerators. To implement these hardware accelerators, the framework reSPACE (reconfigurable Signal Processing And Classification Environment) will be used. In this context, reSPACE will be extended to support complex control algorithms and kinematical computations.
Videos
Recupera REHA: operating principle and usage of the Recupera REHA subsystem

Recupera REHA: Animation of the operating principle and usage of the systems

Recupera REHA: Therapeutic application example of the subsystem

Capio Exoskeleton: Control via biosignals

Demonstration of the Capio exoskeleton control via biosignals: The intended movement of the human operator is detected by the biosignal data processing which triggers the execution of the targeted movement by the exoskeleton. By means of an eye tracker the desired interaction is detected (focusing on a virtual bottle) and by electroencephalographic signals (EEG), the intended movement and the performing limb are determined. Furthermore, by means of electromyographic signals (EMG), the intended movements are verified.