HyRoDyn
Hybrid Robot Dynamics

| Keywords: | series-parallel hybrid robots |
| Status: | active |
| Operating system: | Linux |
| Programming languages: | C++, Python, Ruby |
| Ownership: | This software was developed by the DFKI as well as by the Robotics Research Group and the University of Bremen and is being further developed under this responsibility. For questions and suggestions, please refer to the contact persons. |
Software description
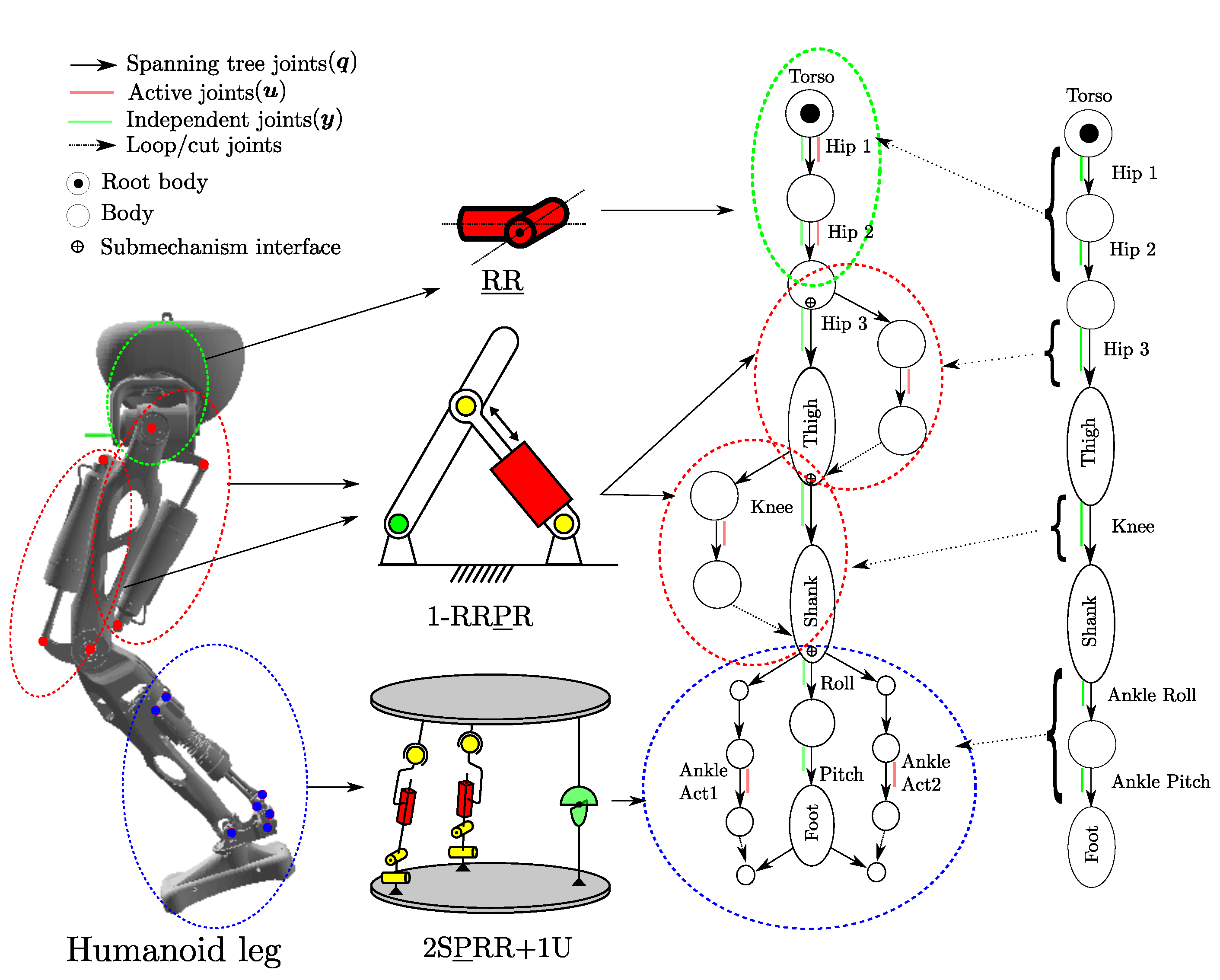
Parallel mechanisms are increasingly being used as modular subsystem units in various robots and man-machine interfaces for their superior stiffness, payload-to-weight ratio, and dynamic properties. This leads to series-parallel hybrid robotic systems, which are difficult to model and control due to the presence of various closed loops. Most model-based kinematic and dynamic modeling tools resolve loop closure constraints numerically and hence may suffer from inefficiency and accuracy issues. Also, they do not exploit the modularity of robot design. Further, such systems can have variable mobility, different assembly modes, and impose redundant constraints on the equations of motion. Hence, it is interesting for kinematics researchers to study the analytical solutions to geometric problems associated with a specific type of PM, and their importance over numerical solutions is irrefutable. But this domain-specific knowledge is often underrepresented in the design of model-based kinematics and dynamics software frameworks.
Hybrid Robot Dynamics (HyRoDyn) is a modular software workbench written in C++ for solving the kinematics and dynamics of highly complex series-parallel hybrid robots. The main idea behind HyRoDyn is to store the closed-form solutions to the loop closure constraints in a configurable mechanism library that is identified by its type (e.g., 1-RRPR, 2SPU+1U, 2SPRR+1U, 6-UPS). Based on submechanisms defined in a hybrid robot, HyRoDyn can modularly compose the loop closure function of the overall system in an automated way. The resulting loop closure Jacobian has a block diagonal structure that can be exploited in the computation of various forward and inverse kinematics and dynamics algorithms. HyRoDyn is implemented in C++ and utilizes recursive O(n) multi-body dynamics algorithms for tree-type systems from the Rigid Body Dynamics Library (RBDL) based on Featherstone's algorithms. Presently, closed-form solutions to mechanisms such as 1-RRPR, 2-SPU+1U, 2-SPRR+1U, 6-RUS, 6-UPS, and parallelogram chains are available in its submechanism libraries. To save time and human expertise, the tool is extended with a numerical approach for parallel mechanisms that are not available in submechanism libraries. HyRoDyn can be used to analytically solve the kinematics and dynamics of any arbitrary series-parallel hybrid robot. The action of the robot can be arbitrarily selected.
The input to HyRoDyn is a SMURF file, which can be generated using a Blender-based visual editor called Phobos. The use of a visual editor makes it easy to annotate the parallel submechanism modules in a robot and assemble them to build highly complex robot models. Further, HyRoDyn has been integrated into the Robot Construction Kit (RoCK) middleware as an orogen component that provides both forward and inverse mappings between the independent joint space of the robot and its actuation space at position, velocity, acceleration, and force levels. The HyRoDyn-orogen component can be used for simulation as well as real-time control of complex series-parallel hybrid robotic systems.

Videos
M-RoCK+VeryHuman: Whole-Body Control of Series-Parallel Hybrid Robots
The Video illustrates the results of the paper Dennis Mronga, Shivesh Kumar, Frank Kirchner: "Whole-Body Control of Series-Parallel Hybrid Robots", Accepted for Publication: IEEE International Conference on Robotics and Automation (ICRA), 23.5.-27.5.2022, Philadelphia, 2022.
RH5: Motion Capture State Feedback for Real-Time Control of a Humanoid Robot
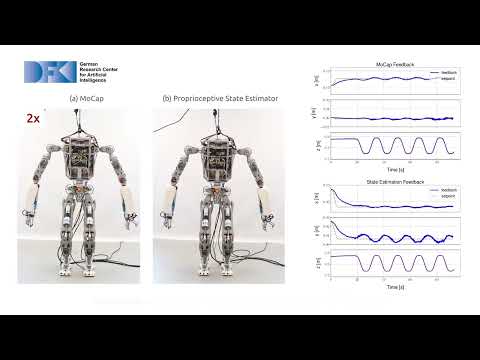
The Video illustrates the results of the paper Mihaela Popescu, Dennis Mronga, Ivan Bergonzani, Shivesh Kumar, Frank Kirchner: "Experimental Investigations into Using Motion Capture State Feedback for Real-Time Control of a Humanoid Robot", Accepted for Publication: MDPI Sensors Journal, Special Issue "Advanced Sensors Technologies Applied in Mobile Robot", 2022.
D-Rock: HyRoDyn - Inverse Dynamics Based on Independent Joint Space Movement

D-Rock: HyRoDyn Phobos XEC

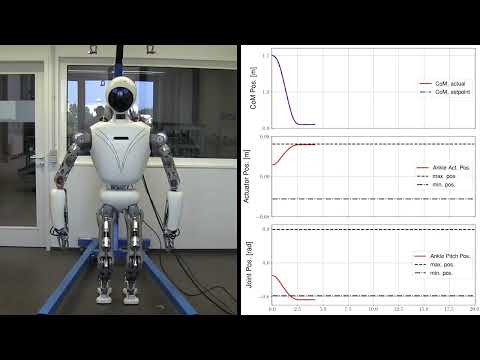
Workflow from Modeling-to-Simulation-to-Real Time Control of a Series-Parallel Hybrid Humanoid Leg
Publications
Modular and Hybrid Numerical-Analytical Approach - A Case Study on Improving Computational Efficiency for Series-Parallel Hybrid Robots
Rohit Kumar, Shivesh Kumar, Andreas Mueller, Frank Kirchner
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (IROS-2022), 23.10.-27.10.2022, Kyoto, IEEE, Nov/2022.
An Analytical and Modular Software Workbench for Solving Kinematics and Dynamics of Series-Parallel Hybrid Robots
Shivesh Kumar, Andreas Mueller
In 43rd Mechanisms and Robotics Conference, Parts A and B, (IDETC/CIE-2019), 18.8.-21.8.2019, Anaheim, CA, ASME, Oct/2019.
HyRoDyn: A Modular Software Framework for Solving Analytical Kinematics and Dynamics of Series-Parallel Hybrid Robots
Shivesh Kumar, Kai Alexander von Szadkowski, Andreas Müller, Frank Kirchner
In Poster at 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS-2018), 01.10.-05.10.2018, Madrid, IEEE/RSJ, series IROS Poster proceedings, pages 1-1, Oct/2018.