COROMA
Kognitiv verbesserter Roboter für flexible Herstellung von Metall- und Verbundteilen

Das Ziel des COROMA-Projekts ist die Entwicklung eines kognitiv verbesserten Roboters, der mehrere Aufgaben zur Fertigung von Metall- und Verbundteilen ausüben kann. COROMA wird dadurch die Flexibilität bereitstellen, die von europäischen Firmen zur Verarbeitung von Metall und modernen Werkstoffen benötigt wird, um sich in einem sich rasch veränderndem, globalen Markt zu behaupten. Das Hauptergebnis des Projekts COROMA wird ein modulares robotisches System sein, das eine Vielzahl von Produktionsschritten autonom ausführen wird, um sich an die Produktionsanforderungen anzupassen. Es wird in der Lage sein sich in einer Fabrik zu bewegen und zu navigieren, in dynamischen Umgebungen Aufgaben zu erledigen, mit verschiedene Werkzeuge umzugehen mit seinem flexiblem Greifer und sich kontinuierlich anzupassen und seine Leistung zu verbessern. Das DFKI RIC ist verantwortlich für die Entwicklung von Methoden für lebenslanges Lernen und das Teilen von erlerntem Wissen.
| Laufzeit: | 01.10.2016 bis 30.09.2019 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Europäische Kommission |
| Förderkennzeichen: | H2020-IND-CE-2016-17/H2020-FOF-2016 723853 |
| Partner: | IDEKO S COOP (Spanien), The University of Sheffield (Vereinigtes Königreich), Universite De Nantes (Frankreich), Kungliga Tekniska Hoegskolan (Schweden), Staubli Faverges SCA (Frankreich)), IT+Robotics SRL (Italien), Convergent Information Technologies GmBH (Österreich), BA Systemes SAS (Frankreich), The Shadow Robot Company Limited (Vereinigtes Königreich), Soraluce S. Coop. (Spanien), Europe Technologies SAS (Frankreich), Equipos Nucleares SA (Spanien), SA SPBI (Frankreich), Aciturri Metallic Parts SL (Spanien), DIN Deutsches Institut Fuer Normung E.V. (Deutschland) |
| Anwendungsfelder: | Logistik, Produktion und Consumer |
| Verwandte Projekte: |
FourByThree
Hochgradig anpassbare robotische Lösungen für eine effektive und sichere Mensch-Roboter-Kooperation in Produktionsabläufen
(12.2014-
11.2017)
|
| Verwandte Robotersysteme: |
COMPI
Compliant Robot Arm
COMPI
Roboterarm mit nachgiebiger Regelung
|
| Verwandte Software: |
MARS
Machina Arte Robotum Simulans
BOLeRo
Behavior Optimization and Learning for Robots
BOLeRo
Behavior Optimization and Learning for Robots
MARS
Machina Arte Robotum Simulans
|

Projektdetails
Die Industrie ist einer der stärksten Motoren der europäischen Wirtschaft. Trotz des großen Erfolgs leidet der europäische industrielle Sektor unter dem globalen Wettbewerb mit Schwellenländern, wodurch die Wichtigkeit der Produktion in der EU stetig sank, von 18,5% des gesamten BIP im Jahr 2000 auf 15,1% im Jahr 2013. 2012 hat die Europäische Kommission das Ziel gesetzt die europäische Industrie zu retten und den Abwärtstrend durch den Einsatz neuer Technologien umzukehren, sodass 2020 der Anteil 20% des BIP der EU beträgt.
Im Moment sind Industrieroboter bei monotonen Fertigungsaufgaben weit verbreitet. Die Automobilindustrie, der erste und größte Roboternutzer der Welt, ist ein Beispiel hierfür. Roboter werden in verschiedenen Schritten entlang der Fertigungskette eingesetzt, aber die Flexibilität in der Einsetzbarkeit jedes Roboters ist begrenzt, da diese Roboter nur dafür vorgesehen sind eine bestimmte Aufgabe optimal durchzuführen.
Flexiblere robotische Fertigungssysteme werden in der Lage sein Aufgaben auszuführen, die aufgrund ihrer Variabilibät und Dynamik zurzeit nicht automatisiert werden können. Das robotische System, welches in COROMA entwickelt wird, wird in der Lage sein zu bohren, trimmen, abzugraten, polieren, schleifen, zerstörungsfrei zu inspizieren und adaptiv zu fixieren und das in Anwendungsdomänen (siehe Abbildung 1), in denen Mobilität und Anpassung an dynamische Umgebungen erforderlich ist. Durch die Nutzung einer einfachen Schnittstelle, wird der Roboter elementare Befehle entgegennehmen, die wenig Programmieraufwand durch den menschlichen Anwender erfordern. Der Robot wird autonom in der Werkstatt navigieren, wird automatisch die Umgebung wahrnehmen, das zu bearbeitende Teil lokalisieren und sogar einige der benötigten Werkzeuge handhaben. Durch Lernen aus vorherigen Erfahrungen beim Bewegen, Greifen der Werkzeuge, Lokalisierung der Werkstücke und dem Fertigungsprozess selbst, wird der Roboter seine Leistung verbessern. Er wird in der Lage sein mit anderen Maschinen in der Produktionsstätte zu interagieren und an Teilen zu arbeiten, sogar wenn andere Fertigungsschritte durch diese Maschinen gleichzeitig durchgeführt werden. Sichere Mensch-Roboter- und Maschinen-Roboter-Zusammenarbeit hat höchste Priorität und der Roboter wird automatisch auf die Anwesenheit von Menschen und anderer Maschinen reagieren. Die Modularität des COROMA-Roboters wird es erlauben ihn anzupassen, um den Anforderungen verschiedener Betriebe gerecht zu werden. Diese Herausforderungen erfordern ein Projektkonsortium, in dem neueste robotische Technologie auf Wissen von Fertigungsexperten trifft, zusammengesetzt aus Industrie und Wissenschaft. Das COROMA-Konsortium stellt eine perfekte Balance aus Industrie und Robotikexperten dar.
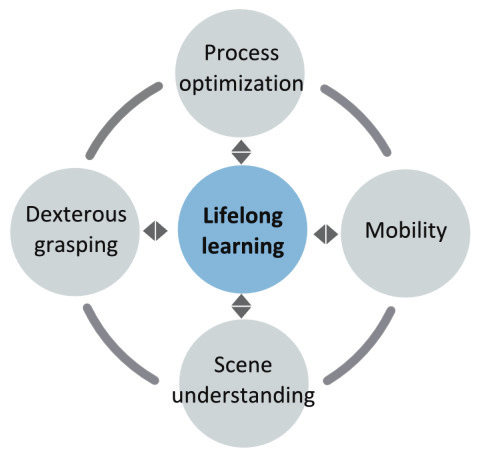
In COROMO wird das DFKI RIC ein System zum lebenslangen Lernen und Teilen von Wissen entwickeln. Eine Testumgebung wird aufgesetzt und ein Demonstrator für die Lernverfahren, wird entwickelt. Dieser löst eine Aufgabe, die im Fokus von COROMA steht. Während des Projekts werden Methoden für Imitationslernen und Methoden für lebenslanges Lernen implementiert, um von Demonstrationen zu lernen (z. B. durch kinesthätisches Lehren oder Teleoperation) und das Verhalten des Fertigungssystems kontinuierlich zu verbessern. Eine umfangreiche Auswertung wird durchgeführt, um Anpassung an sich verändernde Bedingungen zu prüfen (z. B. Fehlfunktionen des Systems oder veränderte Werkstücke). Das System wird Wissen nutzen, das durch andere Systeme mit anderen Fähigkeiten und Morphologien in ähnlichen Aufgaben gesammelt wurde. Das System zum Lernen und Teilen von Wissen wird verbunden sein zu allen Modulen, die die Autonomie des Roboters verbessern und in diesem Projekt entwickelt werden (siehe Abbildung 2). Desweiteren wird das entwickelte System in der Lage sein sein Verhalten über verschiedene, aber ähnliche Aufgaben zu generalisieren, sodass Werkstücke variieren können, zum Beispiel in Größe und Form.