Sherpa
Expandable Rover for Planetary Applications

Technical Details
| Size: | variable size: in standard pose the robot has a footprint of 240cmx240cm and a ground clearance of approximately 50cm. The height of the manipulation tower is then 120cm. The length of the stretched manipulation arm is 180cm |
| Weight: | approx 200kg |
| Power supply: |
Lithum Polymer Batteries at 48.8V
|
| Actuation/ Engine: |
Brushless DC motors with customized FPGA based local electronics
|
| Sensors: |
Stereo camera and laser range finder to the front,
single camera and laser range finder to the back,
single cameras to both sides.
Customized Force-Torque Sensors for each swing unit.
IMU for orientation measurements
Position, speed, current and temperature sensors for each joint
|
| Number of Degrees of freedom: |
30 DOF in total: 4DOF per swing unit + 2DOF per wheel (4 swing units and wheels in total) and 6 DOF manipulation arm
|
Organisational Details |
|
| Application Field: | Space Robotics |
| Related Software: |
Phobos
An add-on for Blender allowing editing and exporting of robots for the MARS simulation
NDLCom
Node Level Data Link Communication
|
| This system is not actively used anymore. | |
System description
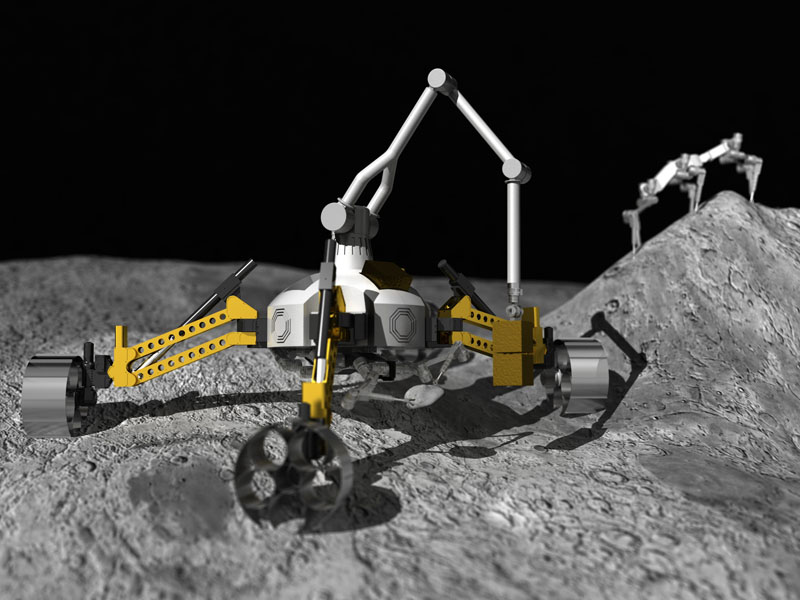
Sherpa is a wheeled rover with an actuated suspension system. This means, that on the one hand the rover can make use of the relatively energy efficient wheeled locomotion, while being on the other hand highly flexible concerning the adaption to various terrains and the possibility to overcome a high range of obstacles.
The manipulation arm is a multipurpose device, apart from the manipulation and assembly tasks that are required in the RIMRES project, it furthermore can be used as a flexible “hazard cam” for a human operator. The manipulator is designed and optimized in a way that allows it to be used for locomotion support as well.
Videos
Sherpa: Lifting

Sherpa using its manipulator to support its weight while lifting the two front legs
Sherpa: Stepping over

Sherpa using its manipulator to overcome an obstacle
Sherpa: Stacking camera payload

CREX demonstrating its postural abilities. These are used for docking to Sherpa or in steep crater slopes
Sherpa: Expandable rover for planetary applications

The video shows how Sherpa is embedded in the project RIMRES and gives first impressions on the locomotion capabilities of the system.