Sherpa
Expandable Rover for Planetary Applications

Technische Details
Systembeschreibung
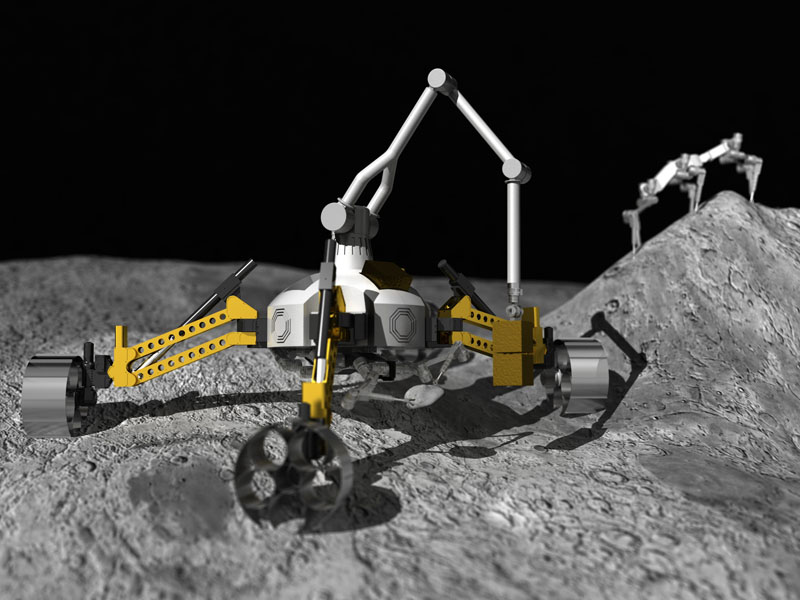
Sherpa ist ein Rover mit aktivem Fahrwerk. Dies bedeutet, dass der Roboter zum einen die relativ energieeffiziente radgetriebene Fortbewegung nutzen kann, sich zum anderen aber hochflexibel an verschiedene Gelände- und Hindernissituationen anpassen kann.
Der Manipulatorarm dient mehreren Zwecken: Im Rahmen des RIMRES-Projektes werden die Nutzlasteinheiten gehandhabt und zu modularen Nutzlasten zusammengebaut. Weiterhin kann die im Arm befindliche Kamera eingesetzt werden, um einem Operator die Möglichkeit zur Überwachung des Systems zu geben. Als drittes Einsatzgebiet kann der Manipulator zur Unterstützung der Lokomotion in besonders schwierigen Situationen genutzt werden.
Videos
Sherpa: Lifting

Sherpa nutzt seinen Manipulatorarm um sich abzustützen, während er zwei Beine anhebt
Sherpa: Stepping over

Sherpa nutzt den Manipulator, um ein Hindernis zu überwinden
Sherpa: Stacking camera payload

Der Rover Sherpa baut einen Payloadstack aus zwei einzelnen Payload-Items zusammen und setzt ihn auf der Oberfläche ab.
Sherpa: Ausbaufähiger Rover for planetarische Anwendungen

Das Video zeigt die Rolle von Sherpa im Projekt RIMRES und die ersten Eindrücke der Flexibilität der Lokomotion des Systems.