SpaceClimber

Technical Details
| Size: | 820 x 1000 x 220 mm (normal posture) |
| Weight: | 18,5 Kg |
| Power supply: |
44,4V / 4Ah (Lithium Polymer)
|
| Speed: | 300mm/Sek |
| Actuation/ Engine: |
24 Joints (48V RoboDrive motors / 1:100 HarmonicDrive gears)
|
| Sensors: |
Joints: Position (absolute 0,18°, relative 0,06°), speed, current, supply voltage, temperature
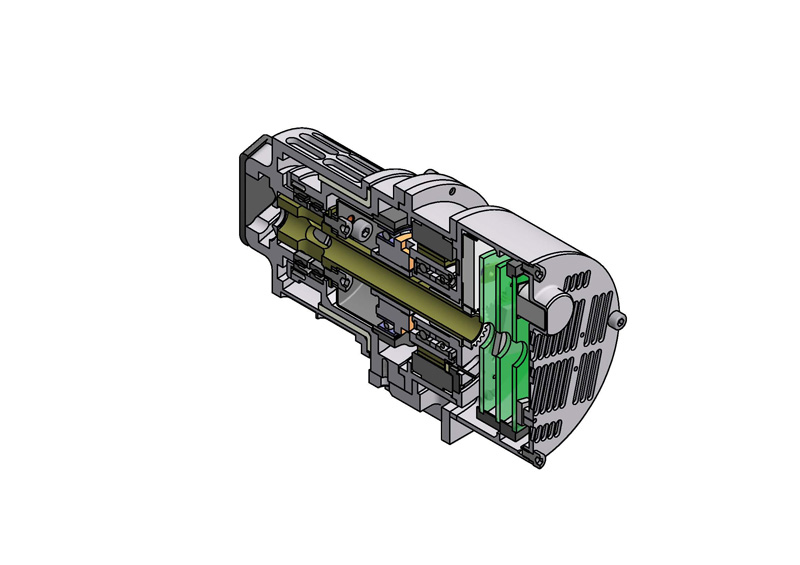
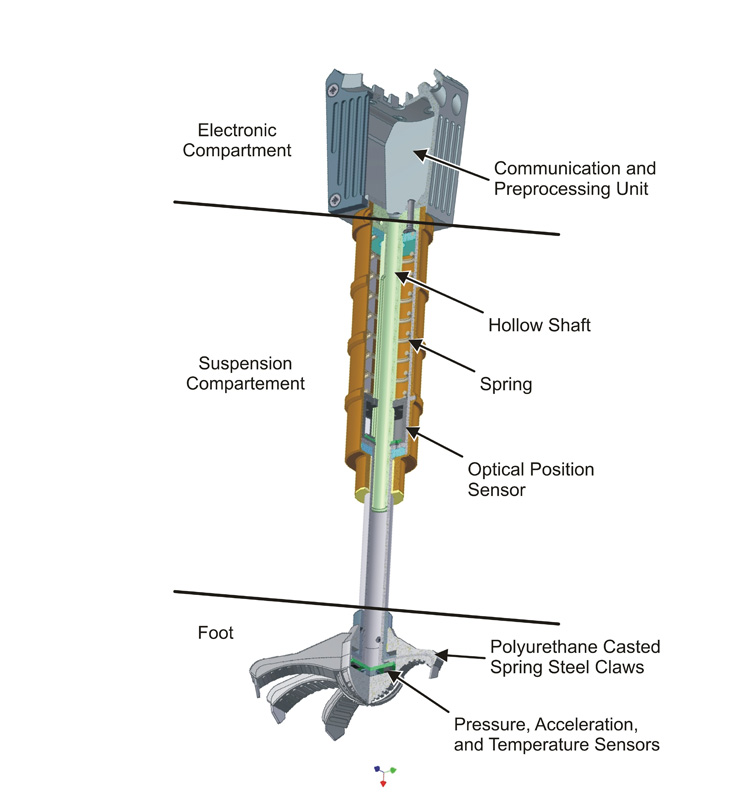
Feet: pressure- und 3-axis-acceleration in the sole, optical odometer in the suspension compartment of the lower leg
Body: Inertia Measurement Unit, overall current and battery voltage
Head: Stereo Camera, Laser range finder
|
Organisational Details |
|
| Application Field: | Space Robotics |
| Related Software: |
Bagel
Biologically inspired Graph-Based Language
BOLeRo
Behavior Optimization and Learning for Robots
Phobos
An add-on for Blender allowing editing and exporting of robots for the MARS simulation
|
| This system is not actively used anymore. | |
System description

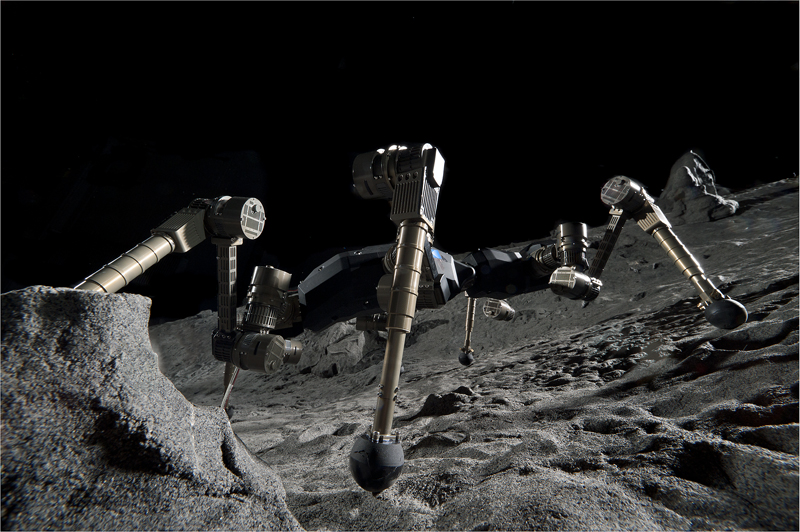
The robot "SpaceClimber" project will prove that legged systems present a very suitable solution to future extraterrestrial missions in unstructured, uneven terrain, in particular in crater and crevices in the rock. The robot system to be developed will be able to safely control up to 80 % non-uniform grades. Local autonomous navigation will be possible due to special sensor technology and new software algorithms for slope navigation.
Thus, in the field of planetary mobility, a technology will be developed which will make future crater and canyon exploration possible. Special emphasis is given to robustness, energy efficiency, redundancy, and autonomy of the robot.
The most important component to reach these goals are the actuators for the locomotor system. Hence, intelligent, lightweight, powerful and energy efficient joints have been developed for the system. As high stability in steep terrain is of utmost importance, the development and realization of novel feet concepts play an important role in the SpaceClimber Project.
Videos
SpaceClimber: A free-climbing robot for extraterrestrial craters

SpaceClimber in the artificial lunar crater in the DFKI RIC Space Exploration Hall.