SpaceClimber

Technische Details
| Größe: | 820 x 1000 x 220 mm (Grundhaltung) |
| Gewicht: | 18,5 Kg |
| Stromversorgung: |
44,4V / 4Ah (Lithium Polymer)
|
| Geschwindigkeit: | 300mm/Sek |
| Antrieb/ Motoren: |
24 Gelenke (48V RoboDrive Motoren / 100:1 HarmonicDrive Getriebe)
|
| Sensoren: |
Gelenke: Position (absolut 0,18°, relativ 0,06°), Geschwindigkeit, Strom, Versorgungsspannung, Temperatur
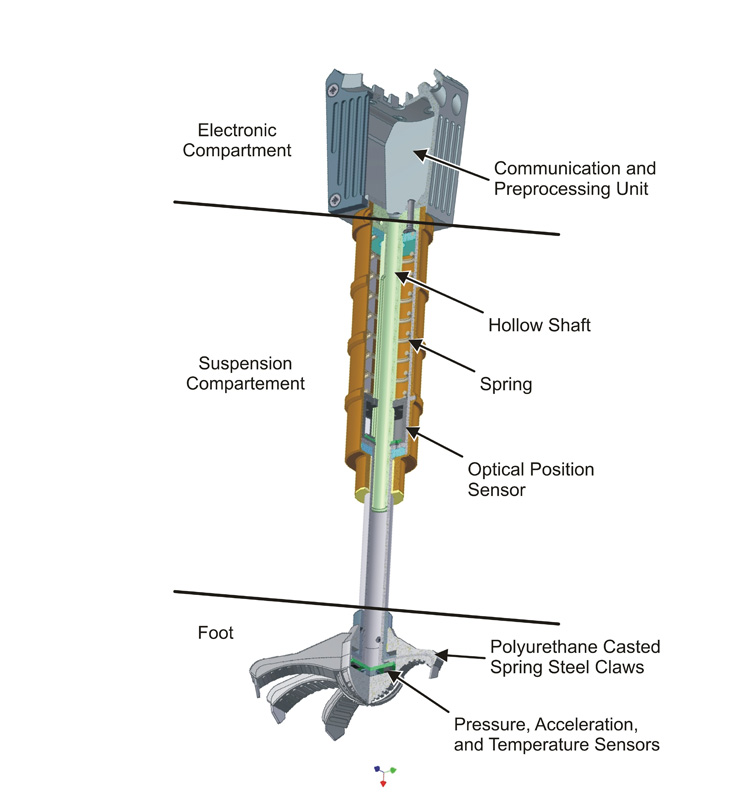
Füße: Druck- und 3-Achs-Beschleunigungssensor in der Fußsohle, optischer Wegmesser im Federzylinder des Unterschenkels
Körper: Inertial Measurement Unit, Gesamtstrom und Batteriespannung
Kopf: Stereo Kamera, Laserscanner
|
Organisatorische Details |
|
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
SpaceClimber
A Semi-Autonomous Free-Climbing Robot for the Exploration of Crater Walls and Bottoms
(09.2006- 09.2009)
SpaceClimber
Ein semi-autonomer freikletternder Roboter zur Untersuchung von Kraterwänden und -böden
(09.2006- 09.2009)
|
| Verwandte Software: |
MARS
Machina Arte Robotum Simulans
Rock
Robot Construction Kit
Bagel
Biologically inspired Graph-Based Language
BOLeRo
Behavior Optimization and Learning for Robots
MARS
Machina Arte Robotum Simulans
Phobos
Ein Blender-Add-On zum Editieren und Export von Robotermodellen für die MARS-Simulation
Rock
Robot Construction Kit
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung

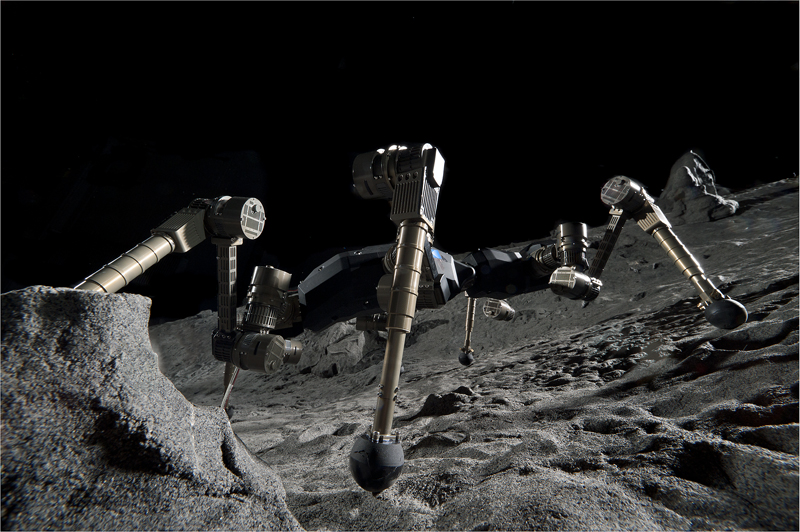
Der Roboter "SpaceClimber" soll nachweisen, dass Laufrobotersysteme für
zukünftige extraterrestrische Missionen in schwierigem Gelände,
insbesondere in Krater- oder Felsspaltenmissionen, eine Lösung
darstellen. Das zu entwickelnde Robotersystem soll nicht-uniforme
Steigungen bis zu 80% sicher beherrschen und auf Basis der eingebrachten
Sensorik in der Lage sein, dort lokal autonom zu navigieren.
Das
System würde somit eine Technologie im Bereich Mobilität bereitstellen,
welche zukünftige Krater- und Canyonexploration ermöglicht. Besonderes
Augenmerk wird bei SpaceClimber auf Robustheit, Energieeffizienz,
Ausfallsicherheit und Autonomie des Roboters gelegt.
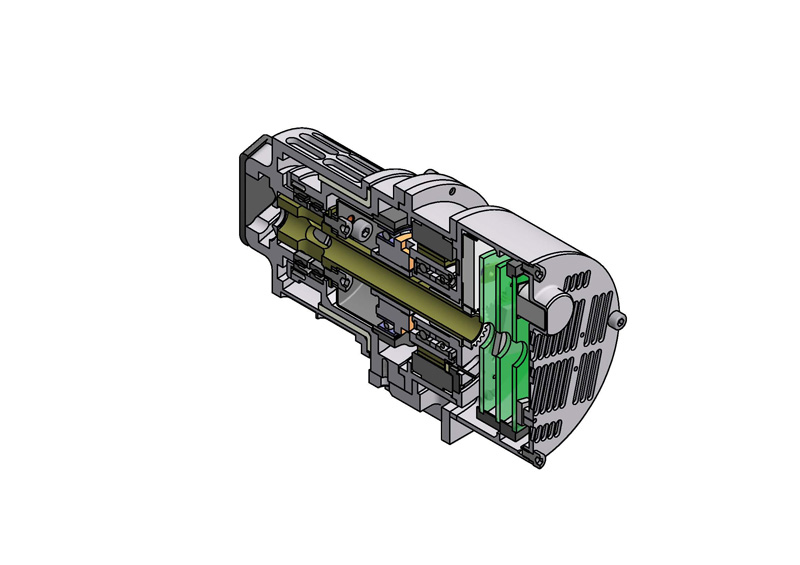
Die
wichtigste Komponente um diese Ziele zu erreichen sind die Antriebe für
den Bewegungsapparat. Für das System wurden daher intelligente, leichte,
kraftvollen und energieeffizienten Gelenke entwickelt. Wichtig für eine hohe Stabilität in steilem Gelände ist die Entwicklung und Umsetzung neuartiger Fußkonzepte.
Videos
SpaceClimber: Frei kletternder Roboter für extraterrestrische Krater

SpaceClimber in dem künstlichen Mond-Krater der DFKI RIC Weltraumexplorationshalle.