TRAILER
Tandem of Rover and Associated Wain for Lunar Extended Roaming

Within the TRAILER project, a multi-robot system is developed which, depending on the mission phase, is either physically connected or separated into individual sub-units.
| Duration: | 01.09.2019 till 31.08.2021 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | ESA |
| Partner: |
COMEX SA (Konsortialführer), Liquifer Systems |
| Application Field: | Space Robotics |
| Related Projects: |
FASTER
Forward Acquisition of Soil and Terrain data for Exploration Rover
(11.2011-
11.2014)
FT-Utah
Field Trials Utah with the TransTerrA System
(06.2016-
03.2017)
Moonwalk
Technologies and Human-Robot Collaboration for Surface EVA Exploration Activities and Training in European Analogue Environments
(09.2013-
08.2016)
TransTerrA
Semi-autonomous cooperative exploration of planetary surfaces including the installation of a logistic chain as well as consideration of the terrestrial applicability of individual aspects
(05.2013-
12.2017)
|
| Related Robots: |
ASGUARD II
Advanced Security Guard V2
|
Project details
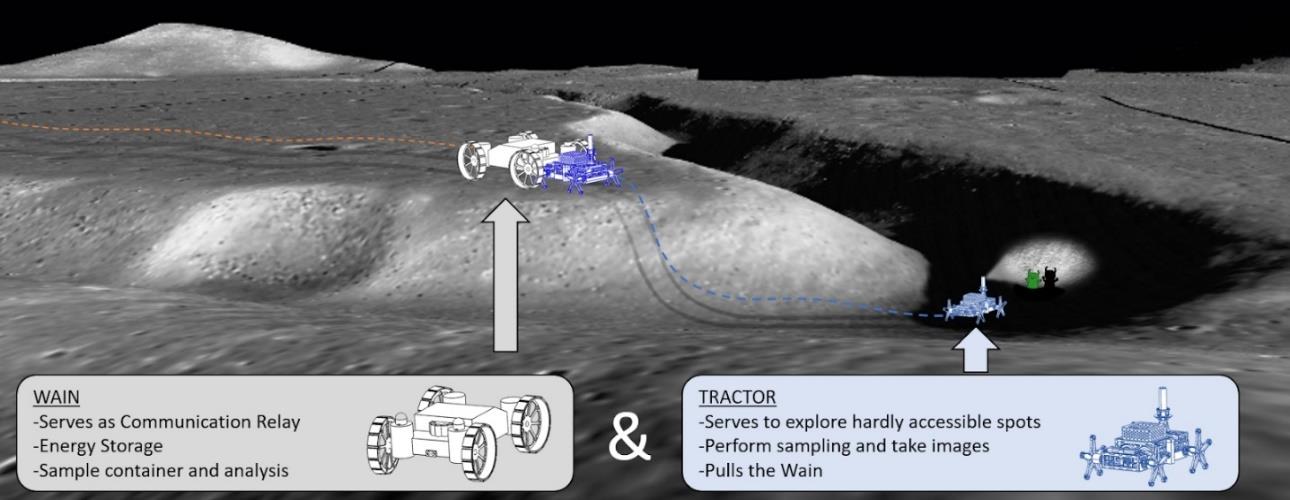

The main objective of the TRAILER project is to develop a compound rover system consisting of (i) an agile and powerful rover, the so-called TRACTOR subsystem, equipped with high performance locomotion and navigation, local wireless transceiver, short-term energy storage, sample acquisition system, and (ii) an active trailer, the so-called WAIN subsystem, equipped with limited locomotion and navigation, high power generation or storage and local wireless network that could assure lunar-earth communication and host a scientific laboratory for sample collection and analysis.
The main purpose of the TRAILER project is to develop and test a novel architecture of robotic exploration vehicles for coming lunar surface missions. A combination of a versatile rover that can dock and undock from a larger carrier vehicle might have several advantages in coming mission scenarios where on one hand large areas have to be traversed and on the other hand specific spots need to be explored - spots that might be hard to reach such as craters with steep slopes, or permanently shadowed regions.