DAGON

Technische Details
Systembeschreibung


Das Dagon-AUV wurde im und für das CUSLAM-Projekt gebaut. Das Fahrzeug ist speziell als wissenschaftliches AUV für visuelle Kartenerstellung und Lokalisierung konzipiert. Es kombiniert die das Beste an Sensorik und Instrumenten, was momentan technologisch möglich ist um Forschung in dieser wichtigen Disziplin auf höchstem Niveau zu ermöglichen.
Die wichtigsten Designkriterien waren es, eine Experimentalplattform für visuelle Kartenerstellung und Lokalisation zu bieten. Als Haupt-Sensorsystem dient ein hochqualitatives Stereo-Kamerasystem, welches durch eine IMU und einen Drucksensor unterstützt wird. Mit Hilfe von visueller Odometrie und SLAM-Ansätzen wird eine Karte des Meeresbodens sowie die Trajektorie des Fahrzeug über dem Meeresboden erzeugt.
Um diese visuellen Messungen zu validieren wird parallel eine zweite Messung mit bekannten und erprobten Algorithmen auf Basis der weiteren Navigationssensorik des Fahrzeuges (LBL, DVL, FOG) aufgenommen. Diese zweite Messung kann dann als Referenzmessung zur Bewertung der Güte der visuellen Messwerte dienen.
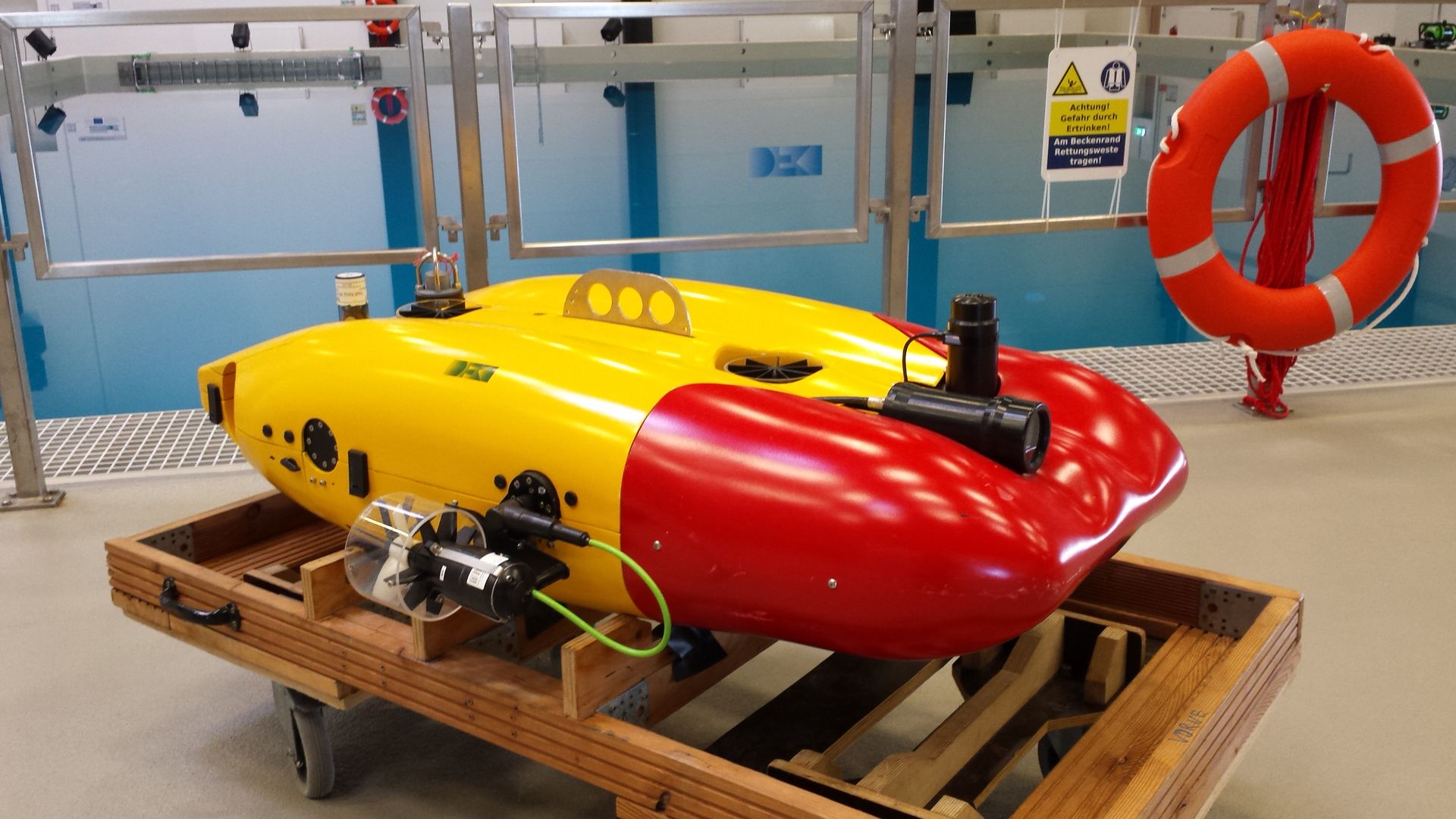
Bei Dagon handelt es sich um ein schwebendes AUV (hovering AUV) - es benötigt keinen Vorschub, um seine Tiefe zu halten. Dies erhöht zwar die Aktuationskomplexität, erlaubt aber eine sehr hohe Manövrierfähigkeit in vielen Umgebungen.
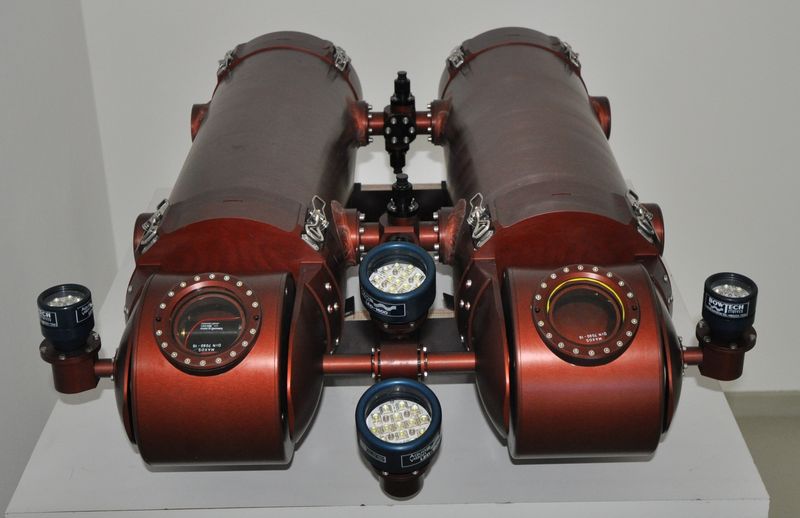
Die sechs Schubaggregate geben Dagon fünf Freiheitsgrade - nur die Rollachse kann nicht aktiv gesteuert werden. Durch den Katamaran-ähnlichen Aufbau wird diese Achse allerdings passiv sehr stabil gehalten. Das Stereokamerasystem ist in den beiden Köpfen des AUVs untergebracht, und kann um 180° um die Querachse geschwenkt werden. Zusammen mit der Schwebefähigkeit ermöglicht dies nicht nur das Kartographieren von Meeresböden, sondern auch Schiffsrumpfinspektion oder sogar unter-Eis-Lokalisierung.
Das Kamerasystem ist in der Lage vier stunden unkomprimiertes HD-video (1920x1080) bei 30 FPS mit beiden Kameras gleichzeitig aufzuzeichnen. Die Kombination aus hochsensitiven CCDs mit großformatigen (F=1.4) und weitwinkligen (64° in Wasser) Objektiven erzeugt gestochen scharfe und präzise Unterwasseraufnahmen.
Das AUV hat einen Betriebszeitraum von etwa sechs Stunden, je nach Missionsprofil. Es kann entweder als vollautonomes System eingesetzt werden, wo nur das schmalbandige Unterwassermodem zur Kommunikation verwendet wird, oder in Verbindung mit einem faseroptischen Kabel für Telemetrieübertragung. Durch die Verwendung dieses Kabels ist auch ein hybrid-ROV-Modus möglich, wo die Steuerung durch einen menschlichen Operator oder eine Bodenstation übernommen wird.
Videos
DAGON: Unter dem Eis
Das AUV Dagon im Unisee unter einer Eisdecke.
DAGON: Pipeline Inspektion
Dagon bei der Inspektion von Kühlwasserleitungen (Durchmesser: 3,5m) am neuen Kohlekraftwerk in Wilhelmshaven.
DAGON: Im Unterwasserlabor
Experimente zur Beweglichkeit und Steuerung im Glasbecken des DFKI mit dem voll-integrierten AUV Dagon.
DAGON: Im Unisee
AUV-Dagon trainiert in einem Binnengewässer bei trüber Sicht.