DAGON

Technical Details
System description


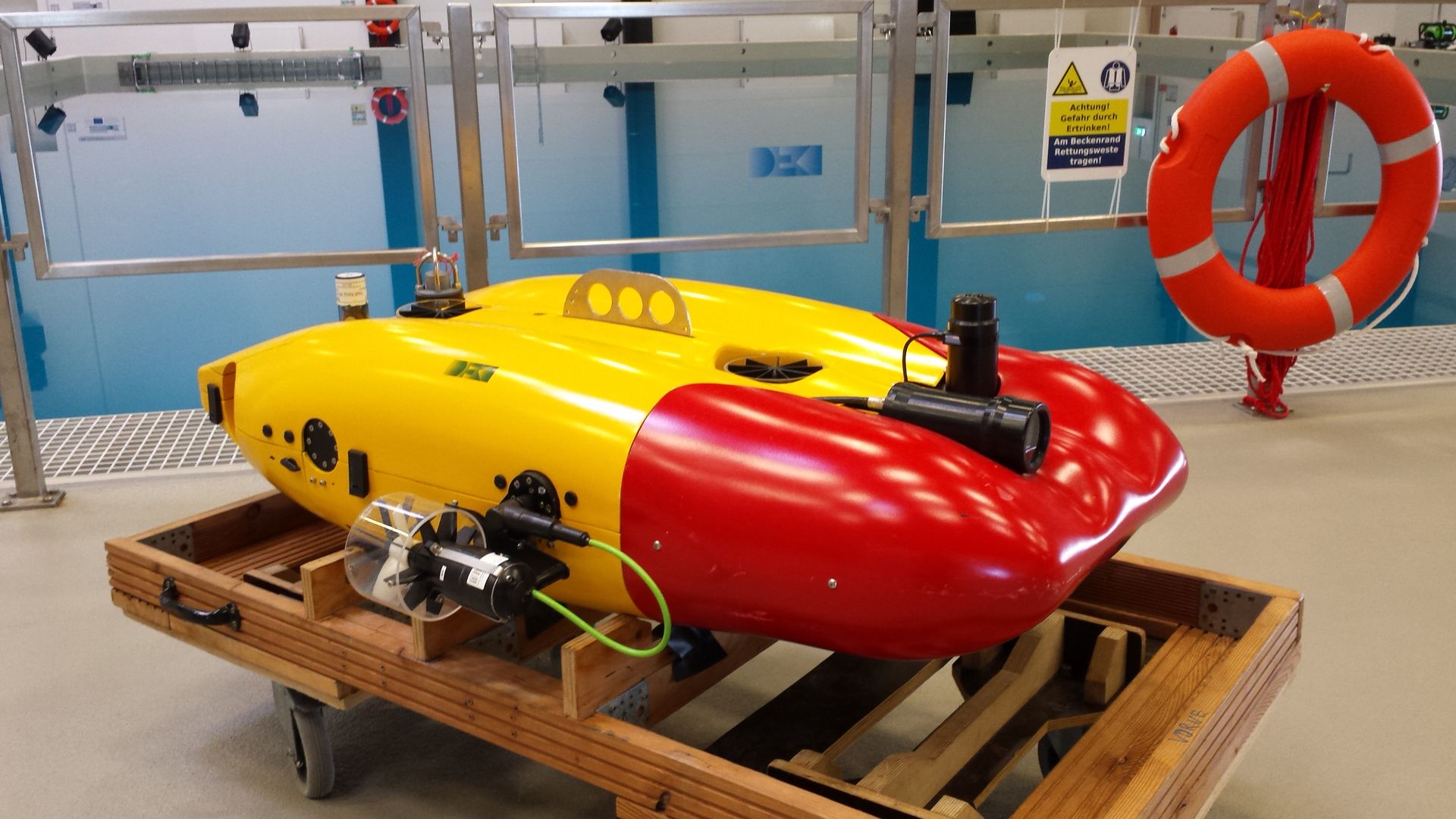
The Dagon AUV was designed and build for the CUSLAM project. The vehicle is specifically designed as a scientific AUV for visual mapping and localization, incorporating high-end instrumentation and sensors to allow research in this area with the best technology can offer today.
The main goals in the design were to provide a platform for conducting experiments in the area of visual mapping and localization. Its high quality stereo camera system acts as the main sensor system for this application and is supplemented by the internal IMU and pressure sensors. Using visual odometry and SLAM approaches a map of the seafloor and the vehicles trajectory over the seafloor is generated.
In order to validate the measurements made by this visual approach to mapping and localization, the complete additional navigation instrumentation available (LBL, DVL, FOG) allows a second independent measurement to be recorded using widely used an proven algorithms. This second measurement can then be used as a ground-truth for judging the quality of the visually generated data.
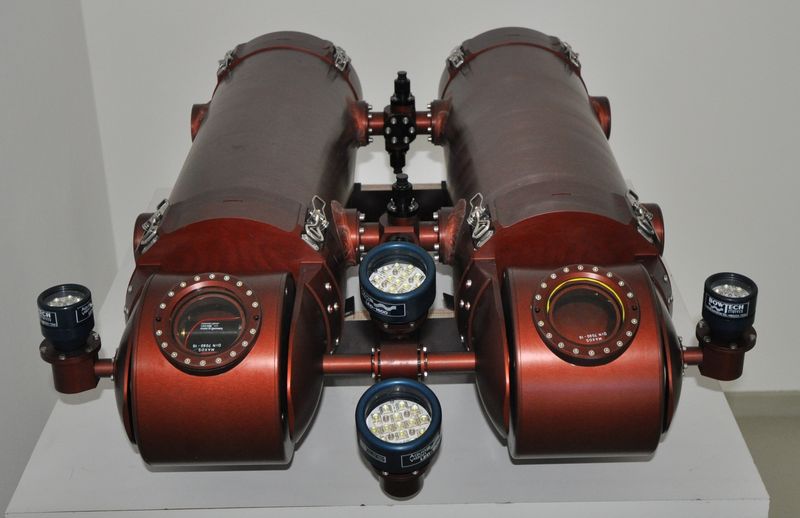
Dagon is a hovering AUV - it does not rely on forward movement to keep its current depth. This makes actuation more complex, but enables unique maneuverability in a wide range of environments. Dagon's six thrusters give it five degrees of freedom - only the roll axis cannot be actively controlled. This last axis is kept passively stable by the catamaran shape of the vehicle. The stereo camera system is mounted in the two heads of the AUV, which offer a 180° range of tilt. Together with the hovering capability this enables not only seafloor mapping, but ship-hull inspection or even under-ice mapping / localization.
The camera system is capable of recording four hours of uncompressed HD (1920x1080) video at 30 FPS - from both cameras simultaneously. Combining extremely sensitive CCDs in the cameras with large-aperture (F=1.4) wide-angle (64° in water) lenses creates precise and feature-rich underwater imagery.
The AUV has a nominal operating time of six hours, which may vary with the type of mission. It can either be used as a completely autonomous vehicle, with the only communication available being the low-bandwidth acoustic modem, or together with a fiberoptic cable for telemetry. Using this cable a hybrid-ROV-mode is also possible, where control is done by a human operator or a control station on shore.
Videos
DAGON: Under Ice

The AUV Dagon in the Unisee under thin ice
DAGON: Pipeline Inspection

The autonomous underwater vehicle (AUV) Dagon inspecting cooling pipes 3.5m in diameter at a power
DAGON: In the underwater lab

Experiments concerning agility and control of the fully integrated AUV Dagon in the DFKI underwater testbed
DAGON: In the Unisee

AUV-Dagon is training in inland water with dimmer sight.