FlatFish
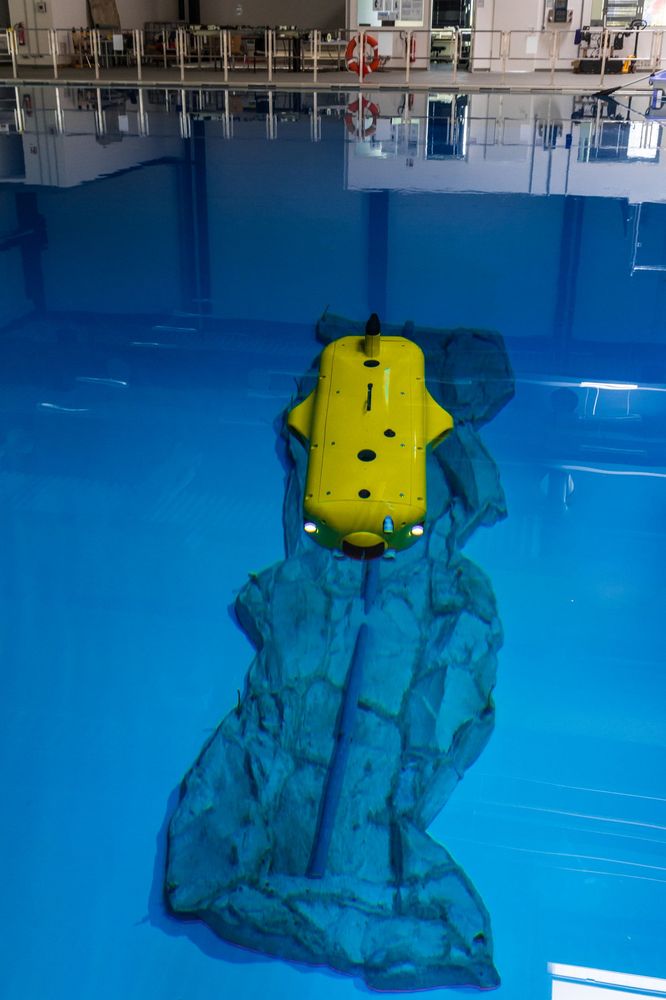
Autonomous underwater vehicle

The FlatFish project is a venture undertaken by the German Research Center for Artificial Intelligence (DFKI), the Brazilian Institute of Robotics (BIR) and Shell. It aims at designing an autonomous underwater vehicle (AUV) for repeated inspections of oil & gas subsea structures whilst being submerged for extended periods of time.
| Duration: | 26.11.2013 till 30.06.2017 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: |
EMBRAPII
anp |
| Partner: | FIEB/SENAI, Shell Brazil |
| Application Field: | Underwater Robotics |
| Related Projects: |
CUSLAM
Localization and mapping in confined underwater environments
(09.2009-
07.2012)
IOP
Inspection of offshore pipelines
(12.2010-
07.2011)
EurEx
Europa-Explorer
(12.2012-
04.2016)
|
| Related Robots: |
AVALON
Autonomous Vehicle for Aquatic Learning, Operation and Navigation
DAGON
|
Project details


To achieve this, a variety of acoustic and optical sensors are employed and a subsea docking station will be designed. Two identical autonomous underwater vehicles (AUVs) will be built, enabling simultaneous software development in both Brazil and Germany.
Mission scenario: The vehicle is docked near an offshore facility and connected to a power supply and data uplink. The operator (either on the facility or at a remote location) commands the vehicle to perform an inspection task. Where the inspection target is remote from the facility the AUV undocks and follows a pipeline or flow line to a target area whilst collecting acoustic and visual data of the pipeline or flow line. Upon reaching the target area, acoustic and visual data from the inspection object is gathered. The vehicle then backtracks using acoustic and visual homing algorithms to return and connect to the docking station. The recorded data is then uploaded to be processed by automated systems and/or the human operator whilst the vehicle’s battery is being recharged. At the same time, the operator has the option of defining a follow-up mission.
DFKI’s contributions to the FlatFish project includes the mechanical and electrical design of the vehicle as well as manufacturing and integration of the AUVs. Also, the basic software modules will be implemented at DFKI to allow for sensor data processing, vehicle control and navigation solutions such as waypoint following.
Higher-level algorithms will be developed as a joint effort between DFKI in Bremen and BIR in Salvador, Bahia.
For the evaluation of energy and high-bandwidth data transfer while submerged, the docking station demonstrator was equipped with optical data transmitters and electrical contacts for battery charging. The data transfer system is based on blue LEDs and achieved data rates of 2.8 MBit/s during the final tests witnessed by representatives from Shell (Rio, Brazil and Houston, USA) and from SENAI-CIMATEC (Salvador, Brazil).
The energy transfer is based on electrical contacts made of Titanium, which are isolated from the surrounding salt water by a sealing system. During the test, successful underwater battery charging was shown several times.
As the industry partner, Shell plans to take the results from the FlatFish project (docking, autonomous inspection, 3D reconstruction, opto-acoustic homing, underwater data and energy transfer) in an effort to commercialize the FlatFish system.
Videos
FlatFish: Autonomous SSIV Inspection & Docking
Fully autonomous FlatFish mission: The AUV undocks, inspects its target (SSIV, subsea isolation valve) and returns to its docking station.