EurEx
Europa-Explorer


The project Europa-Explorer is a pilot survey for future missions to Jupiter's moon Europa. It focuses on the aspect of navigation of robotic systems on and especially under the ice-shield of Europa. Below the surface an ocean comprised of liquid water is expected. After penetration of the ice-shield an exploration can be conducted. A possible mission scenario is drafted, which covers all aspects of an exploration from the time of landing until the transmission of the survey results. In order to demonstrate the feasibility of this scenario, an experimental test platform will be constructed, which is able to be used in an analog mission at a suitable test site on earth. The results of this research can be used for planning purposes of real missions to Europa.
| Duration: | 01.12.2012 till 30.04.2016 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: |
Federal Ministry for Economic Affairs and Climate Action
German Aerospace Center e.V. |
| Grant number: | The EurEx project is funded by the German Ministry for Economic Affairs and Climate Action (BMWI), Grant No. 50 NA 1217). |
| Application Field: |
Underwater Robotics
Space Robotics |
| Related Projects: |
CUSLAM
Localization and mapping in confined underwater environments
(09.2009-
07.2012)
|
| Related Robots: |
Flatfish
Subsea-resident AUV
DAGON
|


Project details
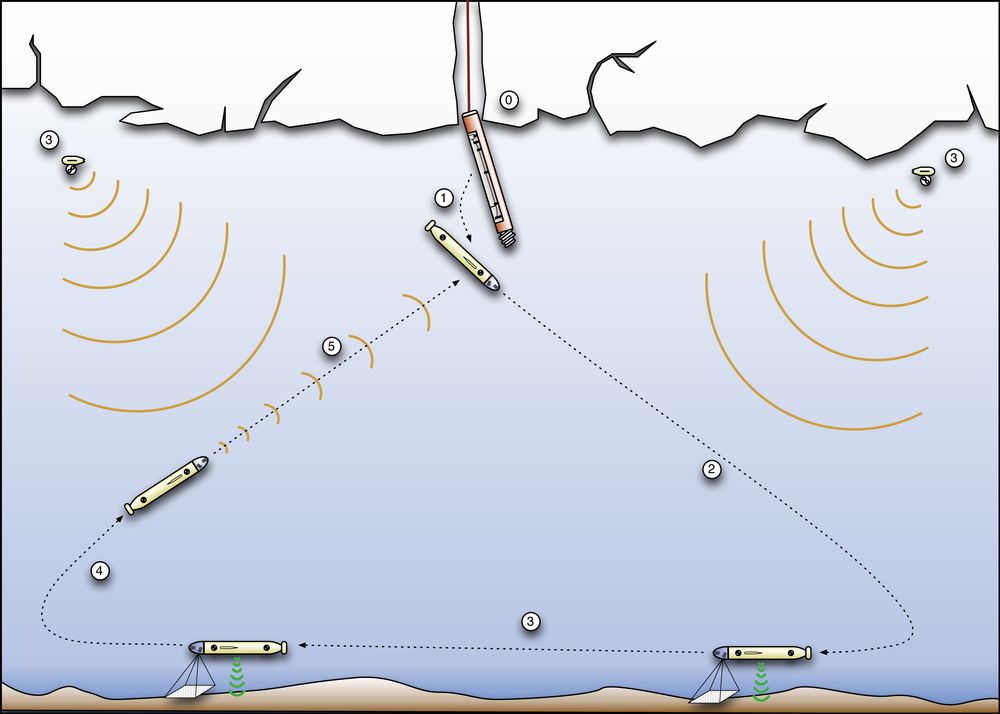


The project Europa-Explorer is a pilot survey for future missions to Jupiter's moon Europa. It focuses on the aspect of navigation of robotic systems on and especially under Europa's surface. Below Europa's ice shield (thickness between 3 and 15 kilometers) an ocean comprised of liquid water is expected. For the exploration of this ocean a fully-autonomous system is necessary due to the long run-time of communication from earth to Europa (33-53 minutes). After landing on Europa the system should execute the following tasks:
- Penetration of the ice shield
- Ejection of an exploration-AUV
- AUV sinks to ocean floor
- Autonomous exploration of the ocean floor and acquisition of measurement data
- Return to the point of entry
- Docking with the ice drill
- Return to the surface
The project Europa-Explorer will create a feasibility study for such a mission in a terrestrial scenario. Its main aspects are navigation under ice and integration of a functional complete exploration system out of the necessary components. A potential real mission is to be drafted together with the Max-Planck-Insitute for Solar System Research. In a two step process first the expected environmental conditions on Europa will be researched, which are the basis for validation experiments in terrestrial environments. In the second step the realizability of the drafted mission with respect to the usability of the build exploration system will be revised in detail. During the second step a possible concept for a full mission (including transit to Europa and landing) will be sketched
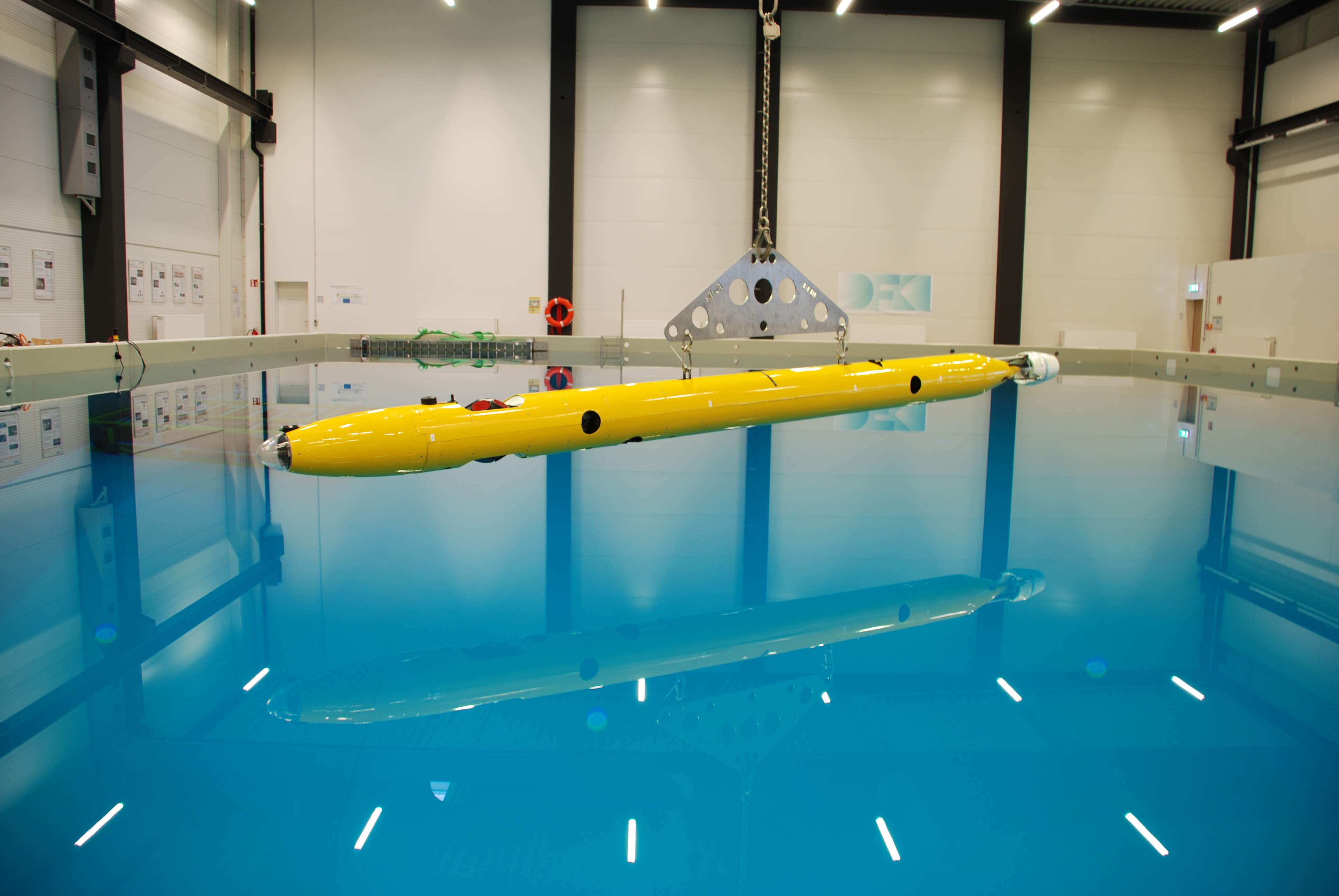
For the evaluation of the developments of this project an exploration-AUV and an ice-drill including a payload-section will be integrated as experiment platforms. The necessity for development of a new system lie in the high order of specialization of the two components: autonomous ice-drilling is a new area of research, especially with an integrated system including a payload system which is not available off the shelf. Regarding the AUV the problem is the specific necessity of a vehicle with small diameter (it needs to fit into the payload section of the ice-drill) with highly-specialized sensors for the exploration under ice - which in this combination are not available on the market, since typically under-ice-exploration AUVs are significantly bigger.
For experimental verification a compact system with all necessary sensors will be developed, which should be less than 20 cm in diameter. Diameters below this mark are preferable, but a compromise between necessary energy demand for ice-drilling and miniaturization of sensors is to be found during the project. AUV and ice-drill will have to be designed along-side in order to make the AUV fit the payload-section of the ice-drill. A special feature of the exploration AUV will be its hybrid propulsion system: besides the main propeller, it will comprise of a variable buoyancy cell (similar to an underwater glider system). This allows changes to overall buoyancy, enabling the AUV to traverse large vertical distances without continuous energy demands. This step is taken as preparation for a real mission to Europa, where an ocean of 100 km depth is expected to exist - much too deep for conventional, actively diving AUVs. The only possibility to provide enough energy to an AUV is to incorporate a RTG into its power system - due to risk of contamination this is deemed impossible for a real mission. Until completion of the exploration AUV the Dagon vehicle, built during the CUSLAM-project will be used as experimentation vehicle (see figure 1). A possible mission scenario including the interaction of ice-drill and AUV is depicted in figure 2.
The EurEx project is funded by the German Ministry of Economics (BMWI), Grant No. 50 NA 1217).
Videos
Europa-Explorer: Mission scenario

Animation of a possible mission on Jupiter’s moon Europa
Europa Explorer: LENG AUV undergoes an autonomous test mission

In this video, the Leng AUV undergoes an autonomous test mission in the saltwater basin of the DFKI Robotics Innovation Center. This mission is analogous to a potential mission in the ice-covered ocean of Jupiter's moon Europa. The vehicle undocks from the IceShuttle and then searches for gliders which act as acoustic navigation aids in a future mission. Following this, the AUV descends by modifying its buoyancy and gliding. Then, the vehicle searches the bottom for a black smoker. Finally, following an ascent (not shown), the vehicle docks again at the IceShuttle to transfer data. The robot-view images seen throughout the video is from data transferred at the end of the mission.