EurEx
Europa-Explorer


Das Projekt Europa-Explorer stellt eine Voruntersuchung für zukünftige Missionen zum Jupitermond Europa dar, die sich vornehmlich auf die Aspekte der Navigation einer robotischen Sonde innerhalb des unter seiner Oberfläche aus Eis vermuteten Ozeans sowie der Penetration des Eismantels konzentriert. Um dies zu erreichen wird ein mögliches Missionsszenario erarbeitet, welches alle Aspekte eines autonomen Explorationsvorgangs vom Zeitpunkt der Landung bis zur Rückübermittlung der gewonnenen Daten betrachtet. Um die Machbarkeit dieses Szenarios zu demonstrieren, wird ein Experimentalsystem aufgebaut, welches in der Lage ist eine Analogmission in einer geeigneten Umgebung auf der Erde durchzuführen. Die so gewonnenen, fundierten Erkenntnisse können in zukünftige Planungen für eine Realmission einfließen.


Projektdetails
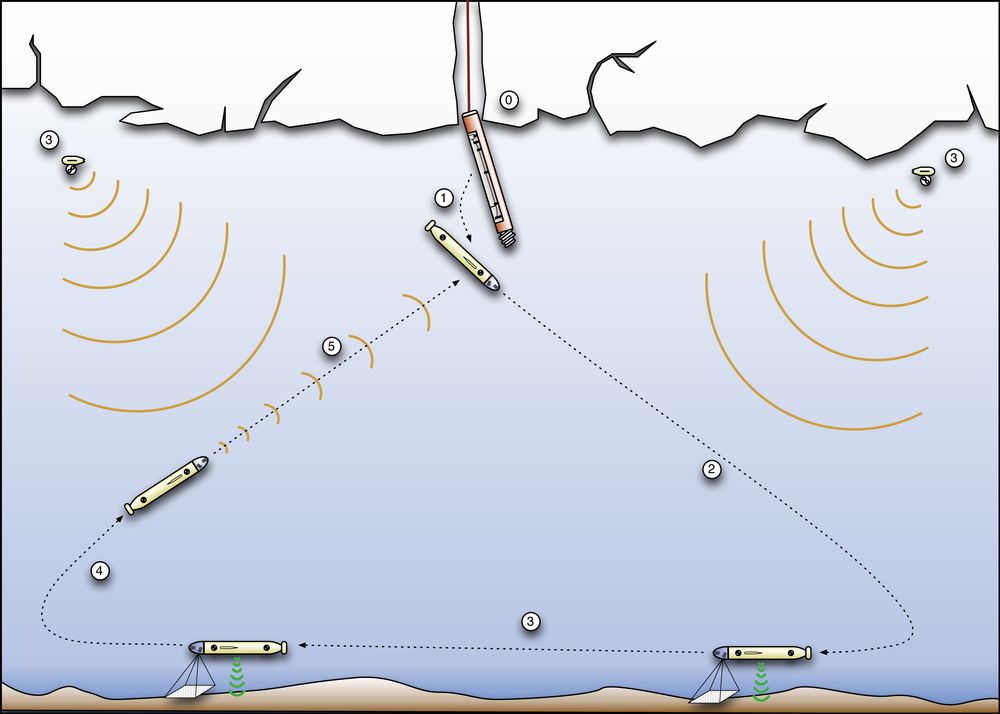



Das Projekt Europa-Explorer stellt eine Voruntersuchung für künftige Missionen zum Jupitermond Europa dar, die sich vornehmlich auf die Aspekte der Navigation von robotischen Systemen auf und vor allem unter seiner Oberfläche konzentrieren. Auf Europa wird unter einer Eisdecke mit einer Dicke von 3-15 Kilometern ein Ozean aus flüssigem Wasser vermutet. Für die Erkundung dieses Ozeans ist ein vollautonomes System notwendig, welches nach der Landung auf dem Mond ohne Steuerung von außen (Zeitverzögerung 33-53 Minuten) folgende Aufgaben durchführen soll:
- Durchbrechen des Eisschildes
- Ausbringen eines Erkundungs-AUVs
- Absinken des AUVs bis zum Meeresgrund
- Vollautonome Exploration und Sammeln von Messdaten
- Rückkehr zur Eintrittsstelle
- Andocken an den Eisbohrer
- Rückkehr zur Oberfläche
Im Rahmen des Projekts Europa-Explorer soll der Machbarkeitsnachweis einer solchen Mission in einem terrestrischen Szenario geführt werden. Dabei liegt das Hauptaugenmerk auf den beiden Aspekten sichere Navigation unter Eis sowie Integration aller Teilkomponenten in ein funktionales autonomes Gesamtsystem aus Penetrationssystem und Erkundungssystem. Eine potentielle Mission soll im Rahmen einer Machbarkeitsanalyse unter Kooperation mit dem Max-Planck-Institut für Sonnensystemforschung untersucht werden. Dafür werden in einem zweistufigen Prozess zuerst die genauen zu erwartenden Umgebungsbedingungen für die Mission auf Europa untersucht, die dann als Grundlage für Validierungsversuche in der terrestrischen Umgebung dienen. Im zweiten Schritt wird das innerhalb von Europa-Explorer erarbeitete Missionskonzept auf seine Eignung im Detail untersucht. In diesem letzten Schritt soll im Ausblick auf zukünftige Vorhaben auch ein mögliches Konzept für die Gesamtmission vom Start auf der Erde bis zur Landung auf Europa und dem Einsatz des Explorationssystems skizziert werden.
Zur Evaluation der Entwicklungen in diesem Projekt sollen das Erkundungsfahrzeug (AUV) und der Eisbohrer mit zugehörigem Nutzlastkompartment als Experimentalplattform aufgebaut werden. Die Notwendigkeit zum Eigenbau dieser Systeme liegt an dem hohen Spezialisierungsgrad beider Komponenten: Wie bereits oben beschrieben, ist autonomes Eisbohren ein noch sehr junges Feld und speziell Eisbohrer mit einem Nutzlastkompartment sind nicht als Kaufsysteme auf dem Markt verfügbar. In Bezug auf das AUV ergibt die Schnittmenge aus verfügbaren Fahrzeugen mit geringem Durchmesser (damit es in das Nutzlastkompartment des Eisbohrers passt) und hochspezialisierter Sensorik für die Navigation unter Eis eine leere Menge - typische Fahrzeuge für den Unter-Eis-Einsatz sind wesentlich größer.
Aus den oben beschriebenen Gründen muss zur experimentellen Verifikation ein kompaktes System mit allen notwendigen Sensoren neu entwickelt werden, für dessen Durchmesser ein Maximum von 20 cm angestrebt wird. Noch geringere Durchmesser sind wünschenswert, hier ist allerdings ein optimaler Kompromiss zwischen notwendigem Energieaufwand für das Eisbohren und der Miniaturisierung der Sensorik im Rahmen des Projekts zu erarbeiten. Dabei werden AUV und Eisbohrer so aufeinander abgestimmt, dass das AUV in das Nutzlastkompartment des Eisbohrers integriert werden kann. Als Besonderheit bei dem geplanten AUV ist zu erwähnen, dass es ein hybrides Antriebskonzept verfolgen soll: Neben einer klassischen Antriebsschraube soll es über eine variable Tauchzelle verfügen (abgeleitet von einem autonomen Gleiter). Diese ermöglicht die Veränderung des Auftriebs des AUVs, so dass es ohne dauerhaften Energieaufwand große vertikale Distanzen zurücklegen kann. Dies geschieht in Vorbereitung auf die reale Mission zum Mond Europa, wo nach Durchbrechen des Eisschildes ein Ozean mit bis zu 100 km Tiefe durchtaucht werden müsste - was energetisch mit aktiv tauchenden Systemen nur möglich ist, falls zur Energieversorgung ein RTG (Radioisotopengenerator) zur Verfügung steht. Da die Verwendung eines solchen Energieversorgungssystems für das Explorations-AUV möglichst verhindert werden soll (Kontaminationsgefahr), ist diese Distanz mit konventioneller Energieversorgung nicht aktiv tauchend überbrückbar. Bis zur Fertigstellung der beiden Systeme wird das AUV Dagon (siehe Abbildung 1) aus dem CUSLAM als Versuchsplattform eingesetzt. Das Zusammenspiel und ein mögliches Aussehen der beiden Systeme ist in Abbildung 2 dargestellt.
Das EurEx Projekt wird vom Bundesministerium für Wirtschaft und Technologie (BMWI) gefördert, (Kennziffer 50 NA 1217)
Videos
Europa-Explorer: Missionszenario

Anmiation des Missionsablaufes auf dem Jupitermond Europa
Europa Explorer: LENG AUV durchläuft eine autonome Testmission

In this video, the Leng AUV undergoes an autonomous test mission in the saltwater basin of the DFKI Robotics Innovation Center. This mission is analogous to a potential mission in the ice-covered ocean of Jupiter's moon Europa. The vehicle undocks from the IceShuttle and then searches for gliders which act as acoustic navigation aids in a future mission. Following this, the AUV descends by modifying its buoyancy and gliding. Then, the vehicle searches the bottom for a black smoker. Finally, following an ascent (not shown), the vehicle docks again at the IceShuttle to transfer data. The robot-view images seen throughout the video is from data transferred at the end of the mission.