DeepLeng
Explorations-AUV für Langstreckenmissionen

Technische Details


Systembeschreibung
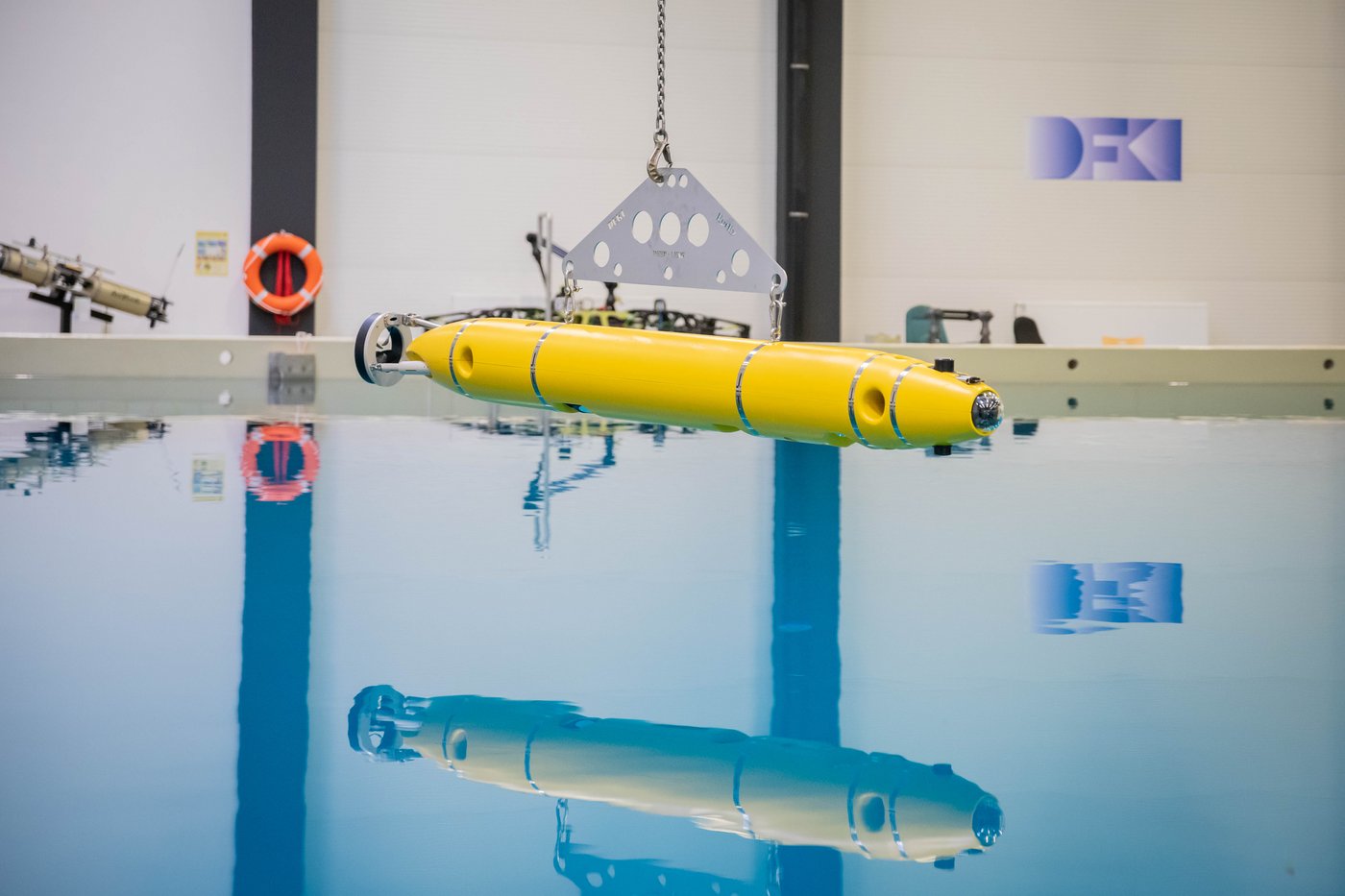
Das autonome Unterwasserfahrzeug (AUV) DeepLeng ist als Langstrecken-Explorationsfahrzeug konzipiert worden, welches in der Lage ist bathyale Tiefen zu erreichen.
Als zweite Iteration des AUVs Leng wurden die Zuverlässigkeit und die Einsatzbereitschaft des Fahrzeugs für die Durchführung von autonomen Langzeitmissionen verbessert sowie die mögliche Tauchtiefe erhöht. Dabei wurde das Gesamtfahrzeugdesign so ähnlich wie möglich gehalten.
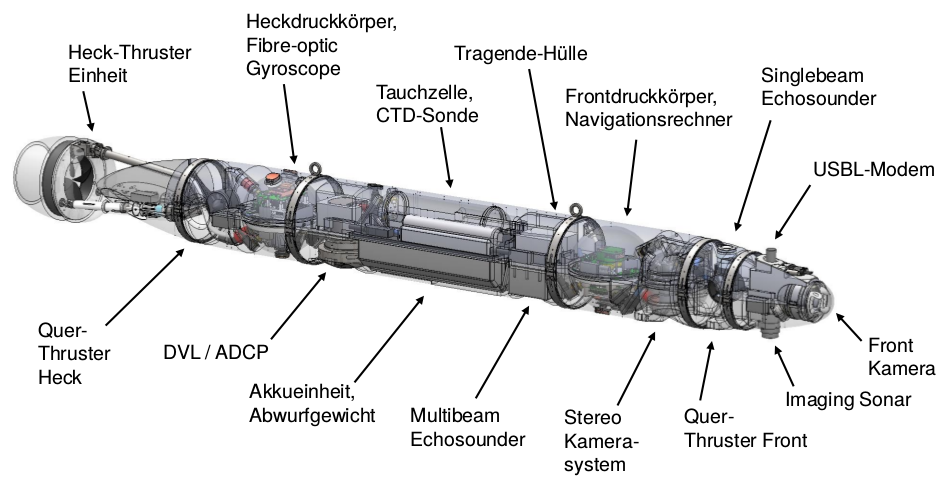
Seine Form ist speziell auf die Anforderung im Europa-Explorer-Szenario angepasst: Ein möglichst geringer Durchmesser, um in einen Eisbohrer zu passen, sowie eine hydrodynamische Strömungshülle, um mit wenig Energieaufwand lange Strecken zurücklegen zu können. Das Fahrzeug ist mit einer Vielzahl unterschiedlicher Navigationssensoren ausgestattet, um eine hohe Sicherheit in der Lokalisation zu gewährleisten. Im Szenario von Europa-Explorer muss das AUV in der Lage sein, auch nach langen Missionen exakt zur Ausgangsposition zurückzukehren.
Die Andockschnittstelle des Fahrzeugs ermöglicht das Laden des Akkus und die Übertragung von Missionsdaten unter der Wasseroberfläche. Eine Nutzlastbucht ermöglicht die Ausstattung des AUVs mit missionsspezifischen Sensoren.
Videos
EurEx-LUNa: Unter-Eis-Navigation des AUV DeepLeng

In diesen kurzen Video erklären wir dir, wie die Navigation des AUV's Deep Leng unterm Eis funktioniert.
EurEx-LUNa: Vorbereitungen für eine Mission zum Jupitermond Europa. Unter-Eis-Feldversuch mit dem AUV DeepLeng

Zum Abschluss der dritten Phase des Europa-Explorer-Projekts zur weiträumigen Unterwassernavigation (EurEx-LUNa) führen DFKI-Forscher nun die letzten Feldversuche im nordschwedischen Abisko-Nationalpark durch. Dort testen sie das autonome Unterwasserfahrzeug DeepLeng im zugefrorenen Torneträsk-See, um die Machbarkeit des Konzepts für die autonome Untereis-Navigation zu beweisen.
AUV DeepLeng: startet eine Mission
AUV DeepLeng: Dockingvorgang unter dem Eis



Weitere Bilder