DeepLeng
Exploration-AUV for Long-Term Missions

Technical Details
| Size: | Ø 0.28 m x 3 m |
| Weight: | Approx. 130 kg |
| Power supply: |
Lithium iron phosphate battery with 1.6 kWh at 40 V (approx. 10 hours endurance)
|
| Speed: | Approx. 3 m/s (6 kn) |
| Actuation/ Engine: |
1x Main thruster Kraken Power T160 (pan-tiltable)
2x Lateral thrusters Blue Robotics T200
2x Buoyancy cells (0.7l volume)
|
| Sensors: |
KVH 1750 IMU
Nortek DVL 500kHz
Valeport MiniCTD Probe
R2Sonic 2020 Multibeam Echosounder
Tritech Micron DST Sonar
Tritech Micron Echosounder
2x Basler acA2440-20gc (ground-stereo camera system)
Basler acA2040-35gc (docking-camera)
4x LED-flasher (6800 lm)
|
| Communication: |
Evologics S2CR 18/34 Acoustic Modem
Ethernet (when tethered with either copper or fiber cable)
WiFi (at the surface)
|
| Max. Operationstiefe: |
2000 m
|
Organisational Details |
|
| Sponsor: |
Federal Ministry for Economic Affairs and Climate Action
German Aerospace Center e.V. |
| Grant number: | Funded by the German Ministry for Economic Affairs and Climate Action (BMWI) (Grant No. 50 NA 1704 and 50 NA 2002) |
| Application Field: |
Underwater Robotics
Space Robotics |
| Related Projects: |
TRIPLE-GNC
TRIPLE-Guidance, Navigation & Control DFKI subproject: acoustic and visual perception of a miniaturized autonomous underwater vehicle for exploration of subglacial lakes
(06.2023- 09.2026)
TRIPLE-nanoAUV 1
Localisation and perception of a miniaturized autonomous underwater vehicle for the exploration of subglacial lakes
(09.2020- 06.2023)
TRIPLE-MoDo
TRIPLE-Mobile Docking System: AI-based close-range navigation and control for soft-robotic-based docking systems
(11.2020- 05.2023)
EurEx
Europa-Explorer
(12.2012- 04.2016)
EurEx-LUNa
EurEx - Persistent under-ice navigation
(03.2020- 09.2023)
EurEx-SiLaNa
EurEx-Safe Long-Term Navigation
(09.2017- 10.2019)
|
| Related Robots: |
Leng
Exploration AUV for long-distance-missions
Teredo IceShuttle
Through-Ice-Cap Transfer-Vehicle & Base Station
|
| Related Software: |
Rock
Robot Construction Kit
|


System description

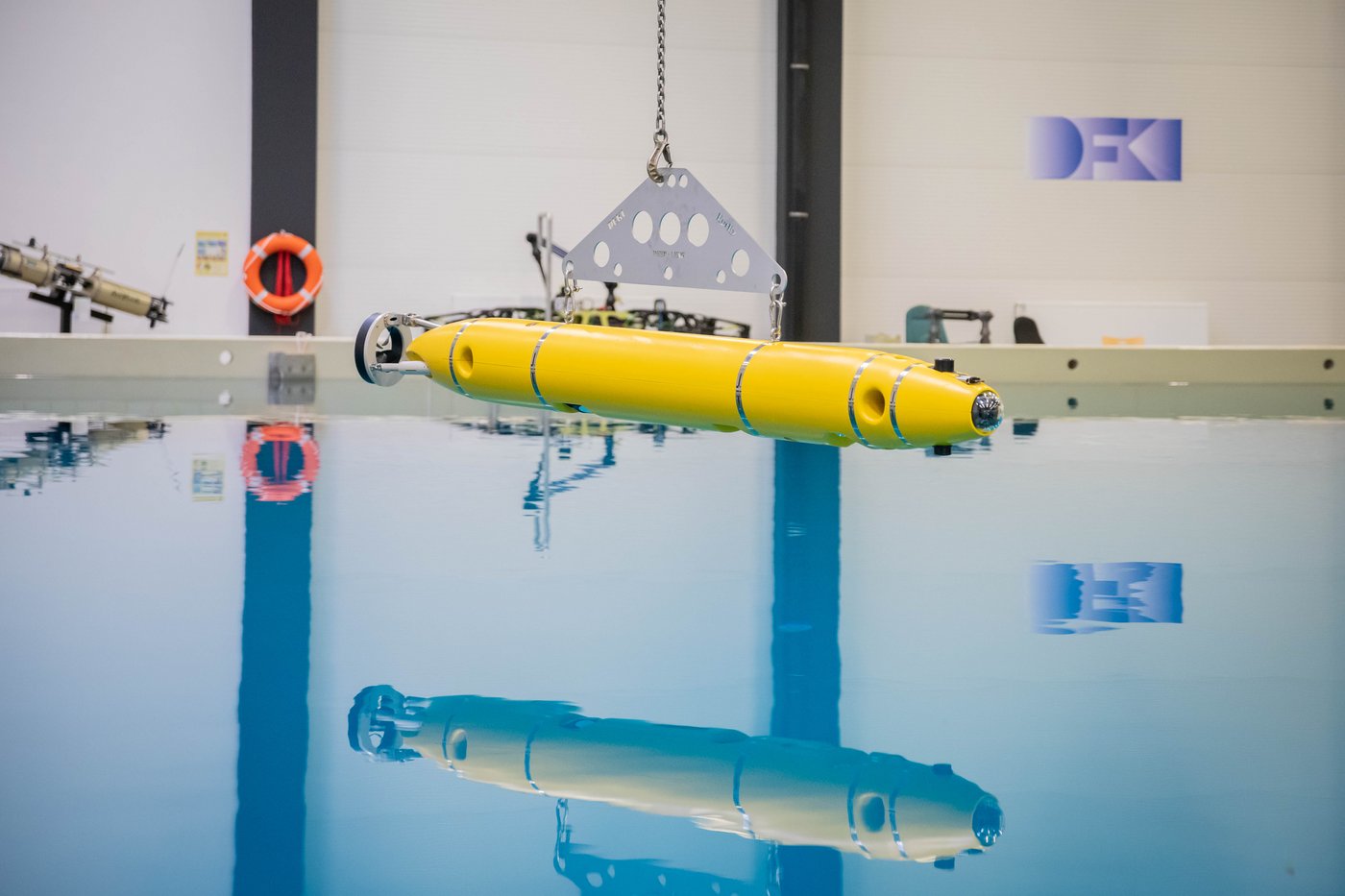
The autonomous underwater vehicle (AUV) DeepLeng was designed as a long-distance exploration vehicle capable of reaching bathypelagic depths.
As the second iteration of the AUV Leng the vehicle’s reliability and readiness for undertaking long-term autonomous missions was improved as well as its depth rating, while keeping the overall vehicle design as similar as possible.
Its shape was specifically designed to meet the requirements of the Europa-Explorer-scenario: very small diameter (in order to fit into an ice drill) as well as a hydro-dynamically optimized outer hull (in order to reduce energy consumption and enable long-range missions).
The vehicle is equipped with a large number of different navigation sensors since localization quality and availability are of key importance. In the Europa-Explorer-scenario the vehicle has to return to its starting position even after having conducted long-distance missions.
The vehicle's docking interface allows sub-sea charging of the battery and transfer of mission data. A payload bay allows the AUV to be equipped with mission-specific sensors.
Videos
EurEx-LUNa: Under Ice Navigation of AUV DeepLeng

In this short video we explain under ice navigation of the AUV Deep Leng.
EurEx-LUNa: Preparing a Mission to Jupiter's moon Europa. Under-Ice field test with the AUV DeepLeng

At the end of the third phase of the Europa Explorer project for long-range underwater navigation (EurEx-LUNa), DFKI researchers are now conducting the final field tests in the Abisko National Park in northern Sweden. There, they are testing the DeepLeng autonomous underwater vehicle in frozen Lake Torneträsk to prove the feasibility of the concept for autonomous under-ice navigation.
AUV DeepLeng: starts a mission
AUV DeepLeng: docking under Ice



Further images
[Translate to English:]