EurEx-LUNa
EurEx - Langstrecken Unter-Eis Navigation


Ein wichtiger Bestandteil zukünftiger Missionen zu eisbedeckten Monden innerhalb unseres Sonnensystems ist die Erkundung der sich unter dem Eis befindenden Ozeane. Aufbauend auf das im Projekt Europa-Explorer entwickelte Explorationskonzept sollen im Vorhaben EurEx-LUNa insbesondere die Fähigkeiten der selbstständigen Unter-Eis-Navigation und -Exploration eines autonomen Systems weiterentwickelt und anschließend in einer Analogmission evaluiert werden. Um eine wiederholte selbstständige Exploration in anspruchsvollen und schwer zugänglichen Umgebungen zu ermöglichen, müssen sowohl die Software als auch die Hardware eines autonomen Unterwasserfahrzeugs ausführlich getestet und stetig verbessert werden. Ein wesentlicher Bestandteil ist dabei die sichere Rückkehr des Unterwasserfahrzeugs und das Andocken an der Dockingschnittstelle, um einen Daten- und Energieaustausch zu ermöglichen. Die Evaluation der Fähigkeiten und der Robustheit des Gesamtsystems sollen innerhalb einer Analogmission in einem von Eis bedeckten See durchgeführt werden.
| Laufzeit: | 01.03.2020 bis 30.09.2023 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: |
Bundesministerium für Wirtschaft und Klimaschutz
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Das EurEx-LUNa Projekt wird vom Bundesministerium für Wirtschaft und Klimaschutz (BMWi) gefördert (Kennziffer 50 NA 2002). |
| Webseite: | https://www.dfki.de/web/forschung/eurex-abisko |
| Anwendungsfelder: |
Unterwasserrobotik
Weltraumrobotik |
| Verwandte Projekte: |
EurEx
Europa-Explorer
(12.2012-
04.2016)
EurEx-SiLaNa
EurEx-Sichere Langzeitnavigation
(09.2017-
10.2019)
CUSLAM
Lokalisierung und Kartenerstellung in beengten Unterwasserumgebungen
(09.2009-
07.2012)
|
| Verwandte Robotersysteme: |
DeepLeng
Exploration-AUV for Long-Term Missions
BlueROV2
Dokumentations-Fahrzeug
DeepLeng
Explorations-AUV für Langstreckenmissionen
DAGON
Explorations-AUV für Langstreckenmissionen
Teredo IceShuttle
Nutzlasttransfer durch Eis & Basisstation
|


Projektdetails




Vom 20. März bis 2. April 2022 reisten fünf DFKI-Wissenschaftler in die nordschwedische Kleinstadt Abisko im gleichnamigen Nationalpark am Torneträsk-See. Dort, nördlich des Polarkreises, erkundete das AUV bei Außentemperaturen um minus 10 Grad autonom den bis zu 168 Meter tiefen zugefrorenen See. Die Forscher waren für die Dauer der Feldversuche in einer Forschungsstation in Abisko untergebracht. Hauptziel war es, die Machbarkeit des Konzepts für autonome Navigation und Docking unter Eis nachzuweisen. Einmal vom Mobilkran gestartet, lässt das Loch im Eis nur einen kurzen Blick auf das drei Meter lange System zu, während es abtaucht und vollständig unter der Eisschale verschwindet um seine Erkundungsmission durchzuführen. Anschließend navigiert es zurück zur Dockingstation, wo es die gesammelten Daten übertragen und seine Akkus aufladen kann. Die Feldversuche waren ein voller Erfolg, das AUV und die Hilfsausrüstung funktionierten nahezu fehlerfrei. Insgesamt konnten über 50 Stunden für Missionen unter dem Eis genutzt werden. Das Hauptziel, die Machbarkeit des Andock- und Navigationsverfahrens unter realistischen Bedingungen zu demonstrieren, konnte bereits in den ersten Tagen erreicht werden, sodass genügend Zeit blieb, wissenschaftliche Datensätze zu sammeln und den See zu erkunden.
Videos
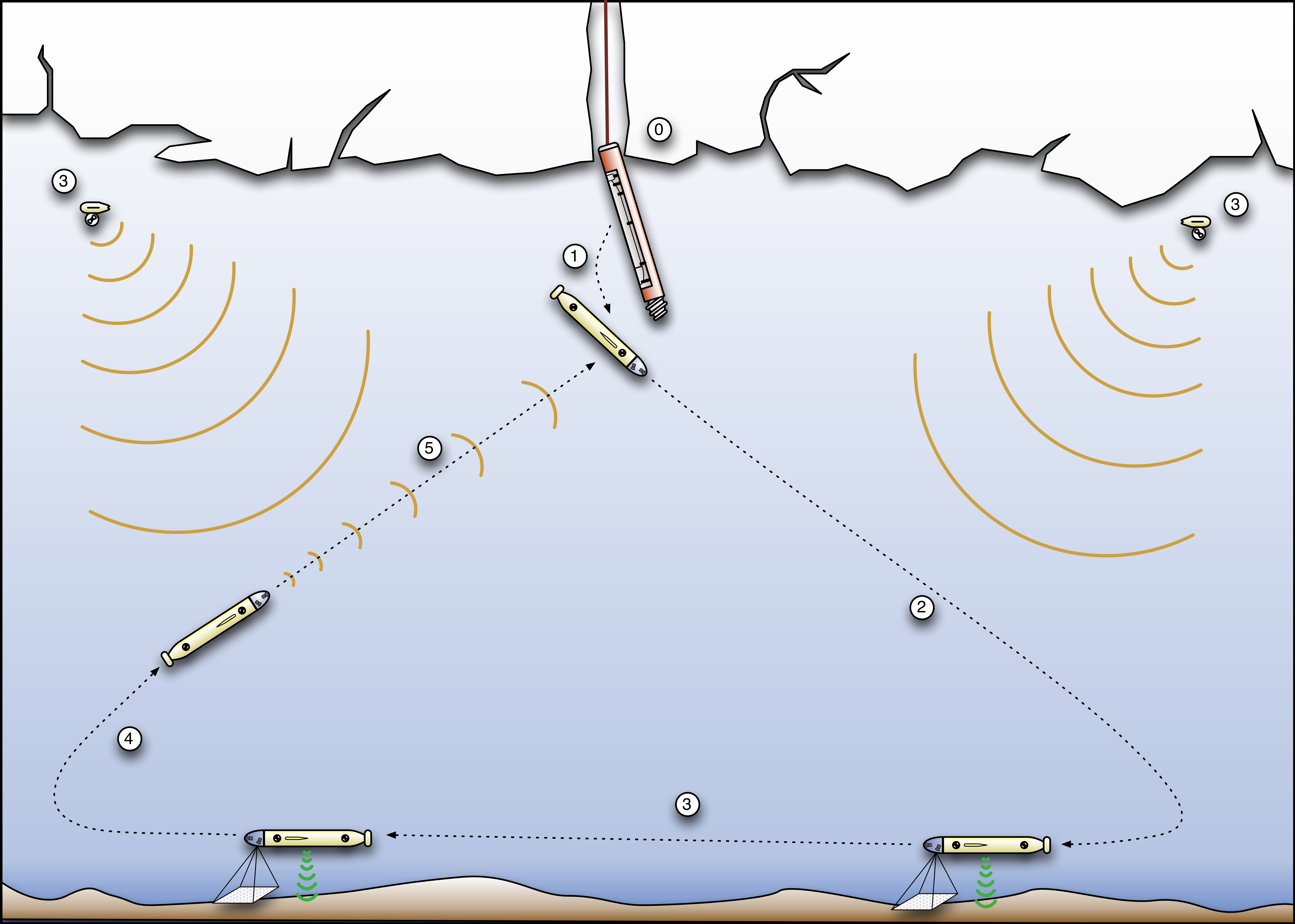
EurEx-LUNa: Unter-Eis-Navigation des AUV DeepLeng

In diesen kurzen Video erklären wir dir, wie die Navigation des AUV's Deep Leng unterm Eis funktioniert.
EurEx-LUNa: Vorbereitungen für eine Mission zum Jupitermond Europa. Unter-Eis-Feldversuch mit dem AUV DeepLeng

Zum Abschluss der dritten Phase des Europa-Explorer-Projekts zur weiträumigen Unterwassernavigation (EurEx-LUNa) führen DFKI-Forscher nun die letzten Feldversuche im nordschwedischen Abisko-Nationalpark durch. Dort testen sie das autonome Unterwasserfahrzeug DeepLeng im zugefrorenen Torneträsk-See, um die Machbarkeit des Konzepts für die autonome Untereis-Navigation zu beweisen.