Flatfish
Getaucht verbleibendes AUV

Ansprechpartner/in:
Technische Details
| Größe: | 205 cm x 96 cm x 50 cm |
| Gewicht: | 275 kg an Luft |
| Stromversorgung: |
5,8 kWh Li-Ion-Akku, Erweiterungsoption auf 11 kWh
|
| Geschwindigkeit: | 3 Knoten |
| Antrieb/ Motoren: |
6x Enitech Ringthruster je 60 N
|
| Sensoren: |
BlueView MB1350-45
Tritech Gemini 720i
2x Tritech Micron Sonar
1x Oculus M1200d Sonar
4x Kamera: Basler ace-2040-25gc, je 2040x2040 Pixel
2x Linienlaserprojektor, 532 nm
Rowe Dual Frequency DVL, 300kHz/1200kHz
Digiquartz 6000 Series Drucksensor
KVH 1750 IMU
Evologics 48/78 USBL
|
| Kommunikation: |
Evologics 48/78 Akustikmodem
50m Gigabit-Kupferkabel
500m Gigabit-Glasfaser
54 Mbps WiFi
|
Organisatorische Details |
|
| Partner: | FIEB/SENAI, BG Brasil |
| Fördergeber: |
EMBRAPII
anp |
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
JIRo
Joint Inspection Robot
(01.2018- 03.2020)
DeeperSense
Deep-Learning for Multimodal Sensor Fusion
(01.2021- 12.2023)
REMARO
Reliable AI for Marine Robotics
(12.2020- 11.2024)
EurEx
Europa-Explorer
(12.2012- 04.2016)
CUSLAM
Localization and mapping in confined underwater environments
(09.2009- 07.2012)
JIRo
Joint Inspection Robot
(01.2018- 03.2020)
REMARO
Reliable AI for Marine Robotics
(12.2020- 11.2024)
DeeperSense
Deep-Learning for Multimodal Sensor Fusion
(01.2021- 12.2023)
CUSLAM
Lokalisierung und Kartenerstellung in beengten Unterwasserumgebungen
(09.2009- 07.2012)
EurEx
Europa-Explorer
(12.2012- 04.2016)
|
| Verwandte Robotersysteme: |
DAGON
Explorations-AUV für Langstreckenmissionen
|
| Verwandte Software: |
Rock
Robot Construction Kit
Rock
Robot Construction Kit
|
Systembeschreibung
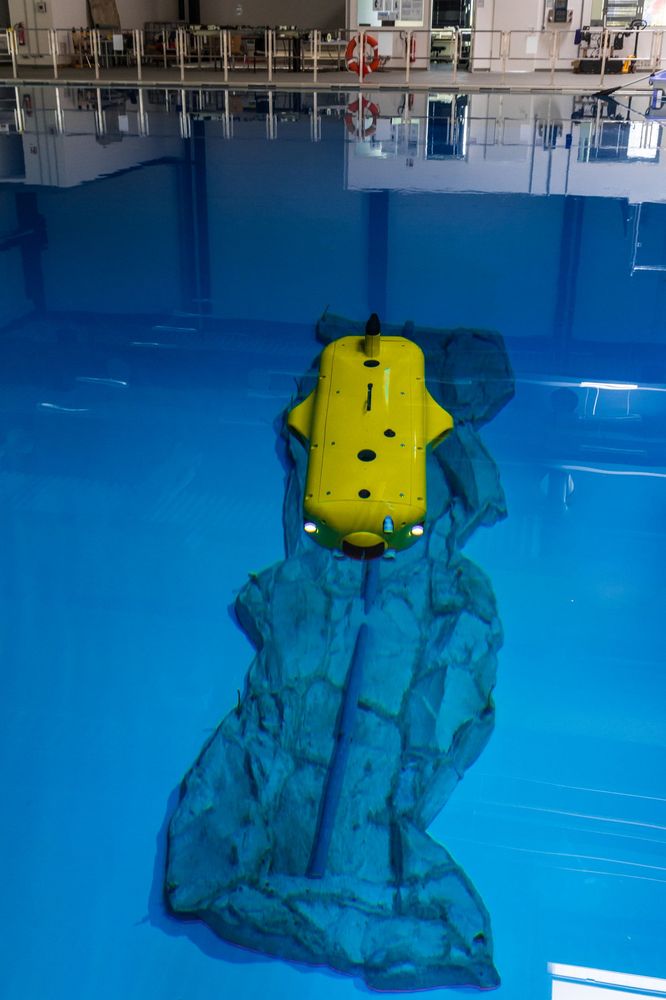
FlatFish ist ein autonomes Unterwasserfahrzeug (AUV) zur regelmäßigen Inspektion von Unterwasserstrukturen im Bereich Öl & Gas, wobei das AUV über längere Zeiträume im getauchten Zustand verbleibt.
Um dies zu erreichen, ist das AUV mit verschiedenen akustische und optische Sensoren ausgestattet und es wurde eine Unterwasser-Docking-Station entworfen.
Zwei identische AUVs wurden gebaut, um eine parallele Softwareentwicklung in Brasilien (Brazilian Institute of Robotics am SENAI-CIMATEC in Salvador) und Deutschland zu ermöglichen.
Missionsszenario:
In der Nähe einer Offshore-Installation befindet sich das Fahrzeug in der Docking Station, die mit Strom- und Datenleitungen angebunden ist. Der Nutzer erstellt (entweder vor Ort oder aus der Ferne) eine Inspektionsmission. Sofern das Zielobjekt nicht in der Nähe der Basisstation ist, folgt das AUV nach Verlassen des Docks einer Pipeline zum Zielgebiet und zeichnet dabei akustische und optische Daten von der Pipeline auf. Sobald das Zielobjekt erreicht ist, wird dessen Zustand opto-akustisch erfasst. Das AUV folgt daraufhin wieder der Pipeline und nutzt akustische und visuelle Verfahren, um an die Basisstation anzudocken. Die aufgezeichneten Daten werden hochgeladen, um automatisiert und/oder vom Nutzer verarbeitet zu werden, während gleichzeitig der Akku des AUVs geladen wird. Der Nutzer hat nun die Option, eine Folgemission zu definieren.
Der am DFKI ausgeführte Anteil des Projekts umfasst den mechanischen und elektrischen Entwurf des Fahrzeugs, aber auch die Fertigung und Integration der AUVs. Weiterhin werden grundlegende Softwaremodule am DFKI implementiert, um die Sensordatenverarbeitung, Fahrzeugsteuerung und Navigationslösungen wie z.B. Waypoint Following zu ermöglichen. High-Level-Algorithmen werden gemeinsam am DFKI in Bremen und am BIR in Salvador, Bahia entwickelt.
Um dies zu erreichen, ist das AUV mit verschiedenen akustische und optische Sensoren ausgestattet und es wurde eine Unterwasser-Docking-Station entworfen.
Zwei identische AUVs wurden gebaut, um eine parallele Softwareentwicklung in Brasilien (Brazilian Institute of Robotics am SENAI-CIMATEC in Salvador) und Deutschland zu ermöglichen.
Missionsszenario:
In der Nähe einer Offshore-Installation befindet sich das Fahrzeug in der Docking Station, die mit Strom- und Datenleitungen angebunden ist. Der Nutzer erstellt (entweder vor Ort oder aus der Ferne) eine Inspektionsmission. Sofern das Zielobjekt nicht in der Nähe der Basisstation ist, folgt das AUV nach Verlassen des Docks einer Pipeline zum Zielgebiet und zeichnet dabei akustische und optische Daten von der Pipeline auf. Sobald das Zielobjekt erreicht ist, wird dessen Zustand opto-akustisch erfasst. Das AUV folgt daraufhin wieder der Pipeline und nutzt akustische und visuelle Verfahren, um an die Basisstation anzudocken. Die aufgezeichneten Daten werden hochgeladen, um automatisiert und/oder vom Nutzer verarbeitet zu werden, während gleichzeitig der Akku des AUVs geladen wird. Der Nutzer hat nun die Option, eine Folgemission zu definieren.
Der am DFKI ausgeführte Anteil des Projekts umfasst den mechanischen und elektrischen Entwurf des Fahrzeugs, aber auch die Fertigung und Integration der AUVs. Weiterhin werden grundlegende Softwaremodule am DFKI implementiert, um die Sensordatenverarbeitung, Fahrzeugsteuerung und Navigationslösungen wie z.B. Waypoint Following zu ermöglichen. High-Level-Algorithmen werden gemeinsam am DFKI in Bremen und am BIR in Salvador, Bahia entwickelt.
Videos
FlatFish: Autonome SSIV Inspektion & Docking
Voll autonome FlatFish Mission: Das AUV koppelt sich ab, inspiziert sein Missionsziel (SSIV, subsea isolation valve) und kehrt zur Docking Station zurück.