IOP
Inspection of offshore pipelines

The aim of the internally financed project „Inspection of Offshore Pipelines“ (IOP) is to create a basis for an autonomous inspection of offshore pipelines. It comprises the components mission planning, video- and sonar-based real-time pipeline-tracking, and data evaluation.
| Duration: | 01.12.2010 till 31.07.2011 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Application Field: | Underwater Robotics |
| Related Projects: |
CUSLAM
Localization and mapping in confined underwater environments
(09.2009-
07.2012)
CSurvey
A semi-autonomous inspection unit for underwater structures and ship hulls - subproject of CView compound-project
(05.2009-
04.2012)
|
| Related Robots: |
AVALON
Autonomous Vehicle for Aquatic Learning, Operation and Navigation
|
Project details

Among the critical components of an autonomous mission are mission planning as well as monitoring of system states in order to detect a possible deviation in time and to start the appropriate counter measures. In the field of autonomous inspection of offshore pipelines, these may be behavior patterns concerning a situation when a pipeline will not be recognized as such any more or further tracking will be made impossible. Within the framework of IOP, methods will be developed which allow a comprehensive monitoring of all software components, and, at the same time, provide the operator with the liberty to dynamically implement new behavior patterns.
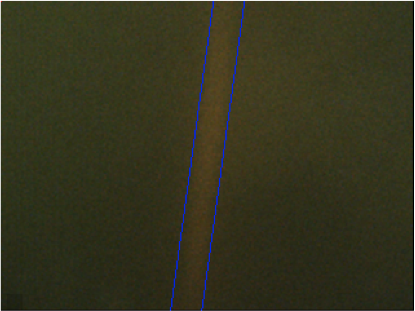
As a rule, the offshore pipelines to be inspected are lined structures which, depending on their environment, have been exposed to diverse growth, thus complicating optical tracking. This is why a novel optical pipeline tracker will be developed within the IOP project as a further basic component which reacts to minimal differences of light and structure between pipeline and environment and facilitates tracking under poor visibility conditions and under partial covering.
The basic technologies developed in this project thus are an important prerequisite in order to take the next step towards a completely autonomous offshore pipeline inspection. A carrier vehicle thus equipped will be able to autonomously detect, inspect, and evaluate damages and to present these graphically processed to the operator.
Videos
IOP: Autonomous Pipeline-Tracking

Vision of an integrated solution for pipeline inspection by an AUV.