IOP
Inspektion von Offshore-Pipelines

Das intern finanzierte Projekt „Inspection of Offshore Pipelines“ (IOP) zielt darauf ab, eine Basis für die autonome Offshore-Pipeline Inspektion zu schaffen und umfasst die Komponenten Missionsplanung, video- und sonarbasiertes Pipeline-Tracking und Datenauswertung.
| Laufzeit: | 01.12.2010 bis 31.07.2011 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
CUSLAM
Lokalisierung und Kartenerstellung in beengten Unterwasserumgebungen
(09.2009-
07.2012)
CSurvey
Eine semi-autonome Inspektionseinheit für Unterwasserbauten und Schiffsrümpfe - Teilprojekt des Verbundprojekts CView
(05.2009-
04.2012)
|
| Verwandte Robotersysteme: |
AVALON
Autonomous Vehicle for Aquatic Learning, Operation and Navigation
AVALON
Autonomous Vehicle for Aquatic Learning, Operation and Navigation
|
Projektdetails

Eine kritische Komponente einer autonom durchgeführten Mission ist die Missionsplannung sowie die Überwachung der Systemzustände, um ein mögliches Abweichen rechtzeitig zu erkennen und entsprechende Gegenmaßnahmen einzuleiten. Dazu gehören bei der autonomen Inspektion von Offshore-Pipelines unter anderem Verhaltensmuster für Situationen, in denen eine Pipeline nicht mehr erkannt oder ein weiteres Tracking nicht mehr möglich ist. Im Rahmen von IOP werden daher Verfahren entwickelt, die eine vollständige Überwachung aller Softwarekomponenten ermöglichen und dem Operator die Freiheit geben, dynamisch neue Verhaltensmuster zu implementieren.
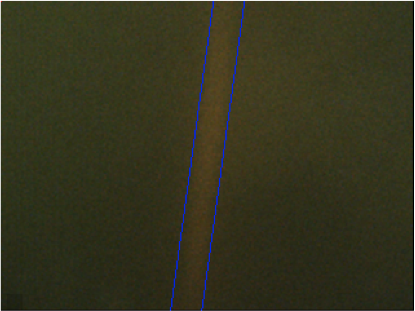
Die zu inspizierenden Offshore-Pipelines sind in der Regel linienhafte Strukturen, die je nach Umgebung unterschiedlichem Bewuchs ausgesetzt sind und ein optisches Tracking erschweren. Aus diesem Grund wird als weitere Basiskomponente im Rahmen von IOP ein neuartiger optischer Pipeline-Tracker entwickelt, der auf geringste Helligkeits- und Strukturunterschiede zwischen Pipeline und Umgebung reagiert und ein Tracking unter schlechten Sichtbedingungen und Teilabdeckungen ermöglicht.
Die in diesem Projekt entwickelten Basistechnologien sind somit eine wichtige Voraussetzung, um den nächsten Schritt zur vollautonomen Offshore-Pipeline Inspektion vollziehen zu können, die es einem damit ausgerüsteten Trägerfahrzeug ermöglicht, autonom Schadstellen zu finden, zu inspizieren, zu bewerten und dem Operator graphisch aufbereitet vorzulegen.
Videos
IOP: Autonomes Pipeline-Tracking

Vision einer integrierten Lösung für eine Pipeline-Inspektion durch ein AUV.