Mare-IT
Information Technology for Maritime Applications


The project Mare-IT focusses on the question, how the information flow can be realized between robotic systems, control stations, systems for teleoperation, digital avatars and business information system in the era of digitalization. The scenario will be realized using an autonomous underwater vehicle, which is equipped with two manipulator arms.
| Duration: | 01.08.2018 till 30.11.2021 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: |
Federal Ministry of Education and Research
German Aerospace Center e.V. |
| Grant number: | Funded by BMBF, Grant number O1lS17029A |
| Partner: |
Wittenstein cyber motor GmbH SAP SE ROSEN Technology and Research Center GmbH |
| Application Field: | Underwater Robotics |
| Related Projects: |
CUSLAM
Localization and mapping in confined underwater environments
(09.2009-
07.2012)
SeeGrip
Autonomous underwater gripper with tactile feedback for form- and force closed object manipulation.
(09.2009-
03.2013)
TransTerrA
Semi-autonomous cooperative exploration of planetary surfaces including the installation of a logistic chain as well as consideration of the terrestrial applicability of individual aspects
(05.2013-
12.2017)
|
| Related Robots: |
DAGON
SeeGrip Manipulation System
|

Project details
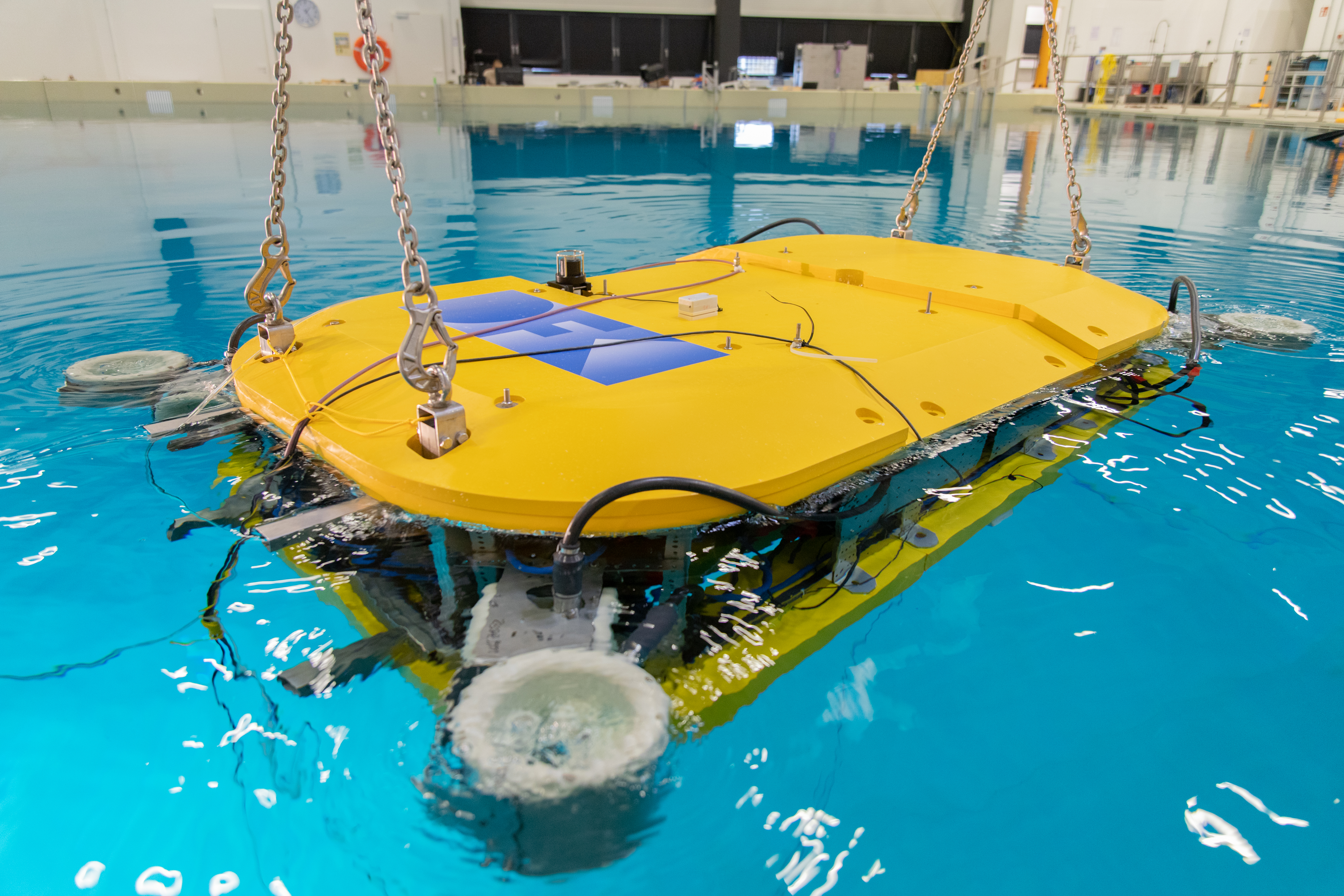

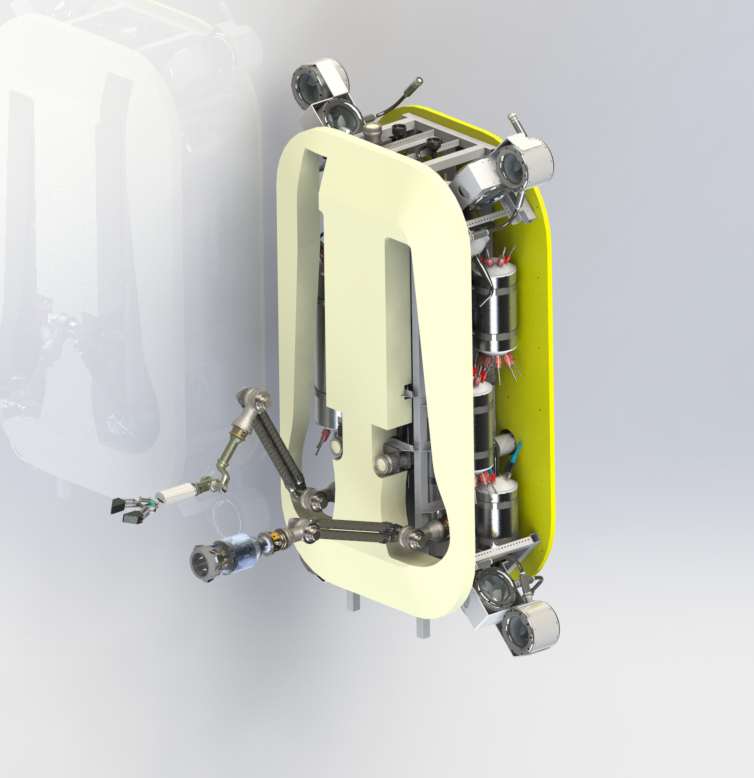
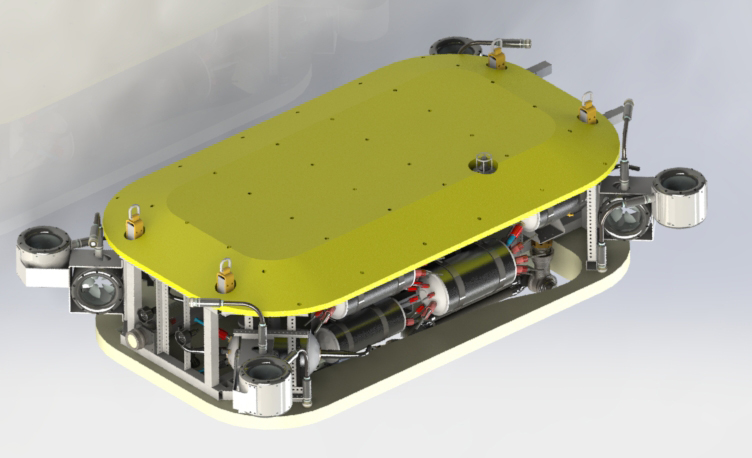
The project Mare-IT focusses on the question, how the information flow can be realized between robotic systems, control stations, systems for teleoperation, digital avatars and business information system in the era of digitalization. The scenario will be realized using an autonomous underwater vehicle (AUV), which is equipped with two manipulator arms.
This platform will be able to switch between autonomous operation to an sem-autonomous mode which allows the handling of manipulation on underwater structures in a teleoperated mode. This enables the possibility for AUVs to take over tasks that have been achieved by remotely operated vehicles (ROVs) before. In combination with subsea resident technologies, these kind of systems are an innovative solution in underwater robotics.
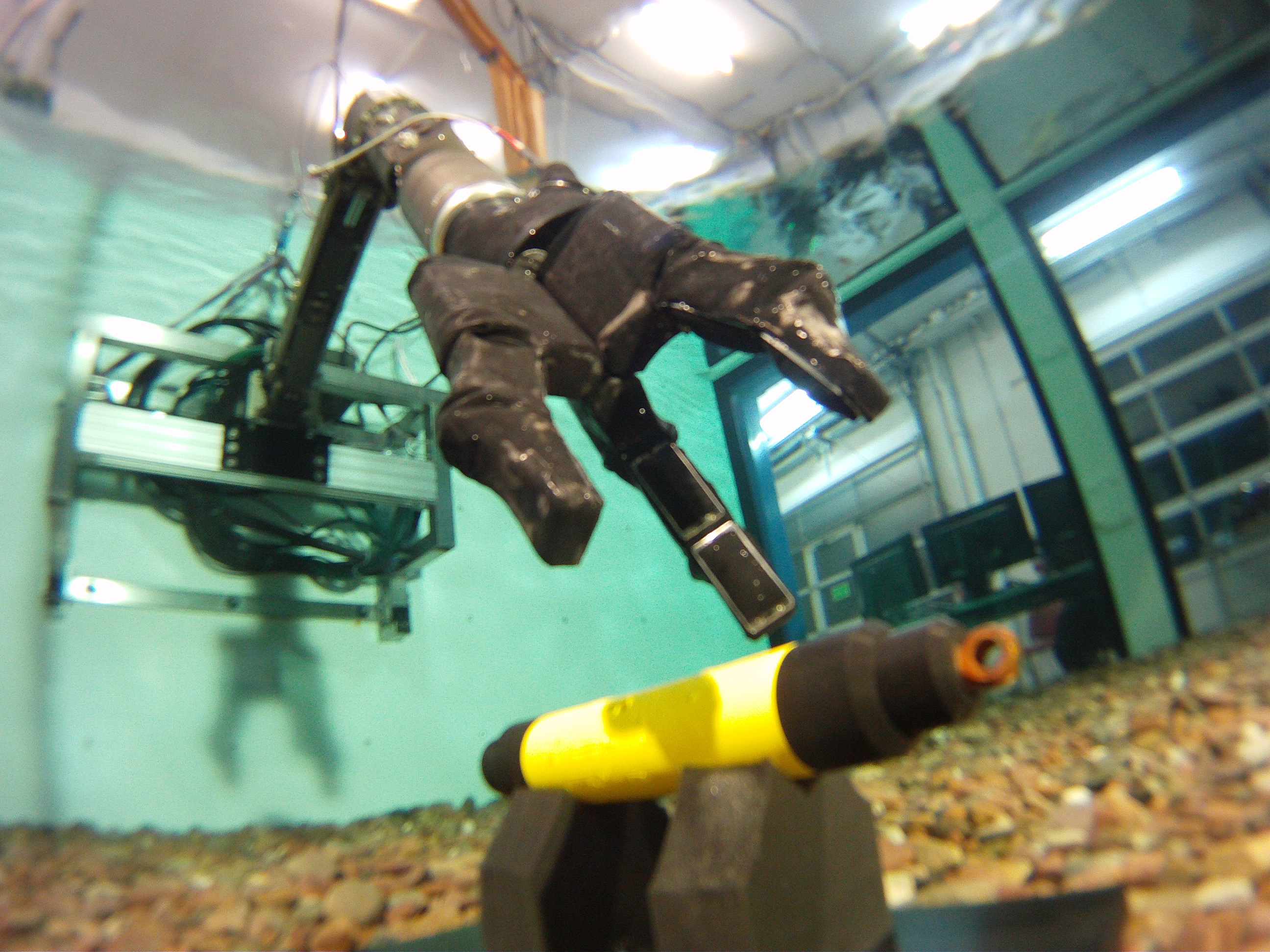
To achieve the project’s goals, a series of scientific questions have to be tackled. These are the design of dual arm autonomous underwater robots, the control of underwater robots during the manipulation tasks in the water column, die processing of complex sensor data streams for display in control units as well as the control and feedback for teleoperation devices like exoskeletons during tasks with limited bandwidth and delay.
These research questions are handled together with different partners. The company Wittenstein cyber motor GmbH develops new types of underwater thrusters, the company ROSEN Technology Research Center GmbH develops sensors for predictive maintenance and the company SAP SE examines the integration of robotic systems in business information systems.
Apart from the Robotics Innovation Center of the German Research Center for Artificial Intelligence, further departments of the institute work in this project. The department for Embedded Intelligence works on new sensor technology applied to underwater and the department Cognitive Assistants works on intuitive user interfaces.
Videos
Mare-IT: Powerful IT infrastructure for underwater maintenance with ground-breaking dual-arm AUV

The project Mare-IT focuses on enhancing the information flow between underwater robotic systems, subsea assets, and land-based control stations to integrate inspection data in business information systems. The targeted scenario is realized with the recently developed autonomous underwater vehicle (AUV) Cuttlefish, which is equipped with two robotic arms to interact with subsea structures.