SeeGrip
Autonomous underwater gripper with tactile feedback for form- and force closed object manipulation.

The goal of the SeeGrip project is the development of an underwater manipulator which is able to perform form- and force-closed object manipulation by using tactile sensor arrays and end-effectors consisting of limb structures. This new kind of manipulator enables the operator to get a feedback about the manipulated objects during assembly tasks in deep sea environments. Especially under diffuse operating conditions caused by swirled-up sediment which constrains the view of the manipulation area, feedback of haptic information supports - or even enables the realization of manipulation tasks.
| Duration: | 01.09.2009 till 31.03.2013 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | Federal Ministry of Economics and Technology |
| Grant number: | This project is funded by the German Federal Ministry of Economics and Technology (BMWi) according to a resolution of the German Bundestag, grant no. 03SX291. |
| Application Field: | Underwater Robotics |
| Related Projects: |
VI-Bot
Virtual Immersion for holistic feedback control of semi-autonomous robots
(01.2008-
12.2010)
CManipulator
An Autonomous Dual Manipulator for Deep-Sea Inspection and Maintenance
(09.2006-
09.2009)
|
| Related Robots: |
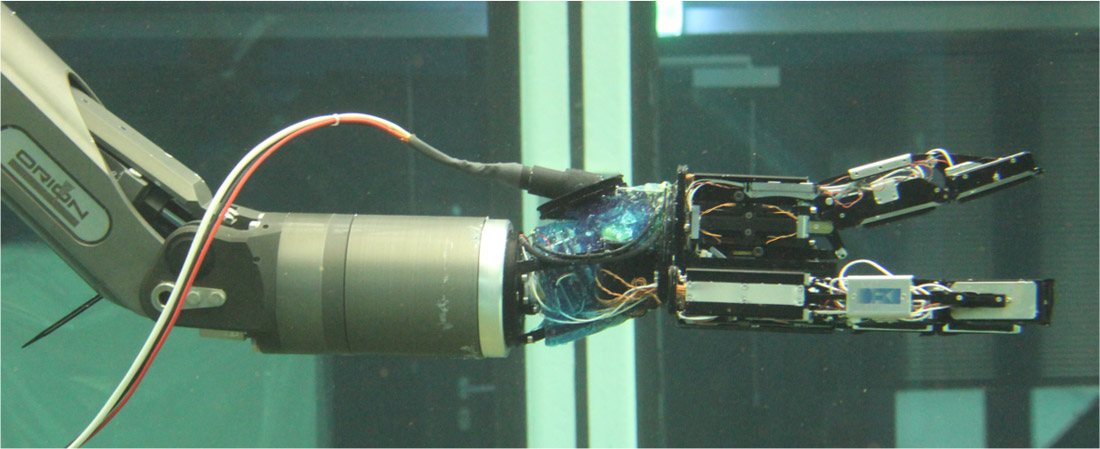
SeeGrip Manipulator
SeeGrip Manipulation System
|

Project details

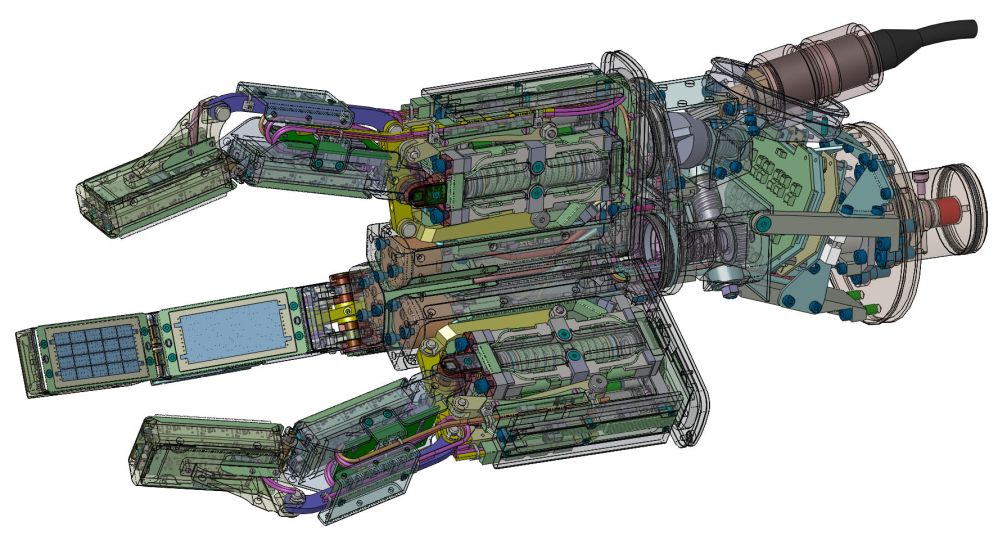
The goal of the SeeGrip project is the development of an underwater manipulator which is able to perform form- and force closed object manipulation tasks by using tactile sensor arrays and multi-limb end-effectors.
With the increasing complexity of manipulation tasks in deep sea environments, there is an increasing need for feedback of sensor data from the manipulation system. Besides visual information through cameras, the sensory feedback of underwater manipulators nowadays is limited to proprioceptive information (like joint positions), thus no further exterioceptive information (like applied forces) are available.
Under these conditions, manipulation tasks become a time-consuming and challenging task for manipulator operators. In cases where the field of view is limited or where even no direct view on the operation scene is realisable, manipulation tasks have to be handled blindly which is why these tasks cannot be performed under such conditions.
Through the use of large-area sensor networks, the SeeGrip Manipulator System will massively increase the efficiency and the range of missions for underwater manipulation systems. Besides the realisable feedback of haptic information for the operator, the tactile sensors can be used to implement autonomous behavior which will detect and react to critical situations like slipping of objects. Unlike current available underwater manipulator systems, the use of multi-limb structures for the gripper together with the integrated sensors will allow gentle manipulation tasks.
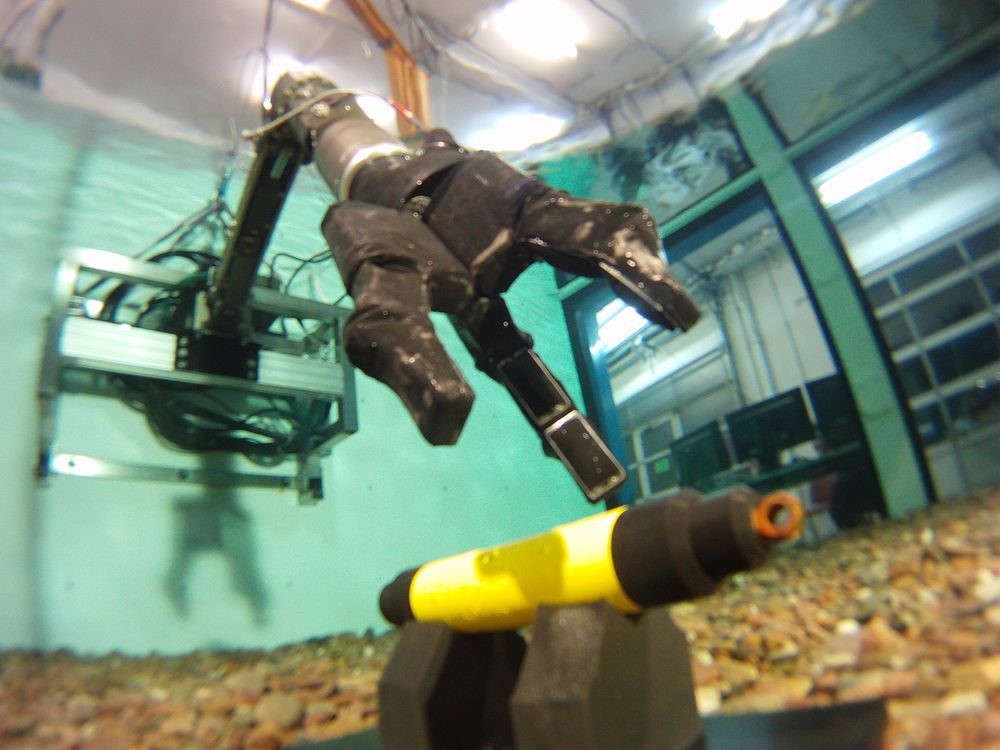
In order to evaluate and verify different modules for the use in deep sea environments, the manipulator and its components will be exposed to ambient pressure of up to 600 bar in the pressure-chamber of the underwater testbed.
Videos
SeeGrip: Autonomous underwater object manipulation

This simulation shows the results of evaluating the SeeGrip gripper which has been developed at the DFKI in a pressure chamber that generates an ambient pressure of up to 600 bar.
SeeGrip: Pressure chamber