SeeGrip
Autonomer Unterwassergreifer mit taktiler Rückkopplung für form- und kraftschlüssige Objektmanipulation.

Ziel des Projektes SeeGrip ist die Entwicklung eines Unterwassermanipulators, welcher durch taktile Sensorfelder und mehrgliedrige End-Effektoren in der Lage ist, form- und kraftschlüssige Objektmanipulationen durchzuführen. Damit wird einem Operator bei Handhabungsvorgängen in Tiefseeumgebungen eine Rückkopplung über zu manipulierende Objekte ermöglicht. Gerade unter Operationsbedingungen, bei denen starke Trübungen durch beispielsweise aufgewirbeltes Sediment die Sicht stark erschweren, führt die Rückkopplung haptischer Informationen dazu, dass die Manipulationsvorgänge erleichtert oder erst möglich werden.
| Laufzeit: | 01.09.2009 bis 31.03.2013 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Bundesministerium für Wirtschaft und Technologie |
| Förderkennzeichen: | Gefördert vom Bundesministerium für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages. Förderkennzeichen: 03SX291 |
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
VI-Bot
Virtual Immersion for holistic feedback control of semi-autonomous robots
(01.2008-
12.2010)
CManipulator
Autonome Dual-Arm Manipulation für Inspektion und Wartung in der Tiefsee
(09.2006-
09.2009)
|
| Verwandte Robotersysteme: |
SeeGrip Manipulator
SeeGrip Manipulation System
SeeGrip Manipulator
SeeGrip Manipulation System
|

Projektdetails

Ziel des Projektes SeeGrip ist die Entwicklung eines Unterwassermanipulators, welcher durch taktile Sensorfelder und mehrgliedrige End-Effektoren in der Lage ist, form- und kraftschlüssige Objektmanipulationen durchzuführen.
Mit den zunehmend komplexer werdenden Manipulationsaufgaben in Tiefseeumgebungen steigt der Bedarf an Rückkopplung sensorischer Daten aus dem Greifersystem. Heutige Unterwassermanipulatoren liefern neben optischen Informationen nur eingeschränkt Informationen propriozeptiver Art (wie z.B. Gelenkpositionen) und keine weiteren exterozeptiven Sensordaten (wie z.B. aufgebrachte Kräfte). Dadurch werden Arbeitsvorgänge zu einer zeitaufwändigen und anstrengenden Tätigkeit für die Operatoren. Bei schwer oder nicht einsehbaren Operationsumgebungen führt dies dazu, dass Manipulationsaufgaben nicht durchgeführt werden können, da in diesem Falle blind operiert werden müsste.
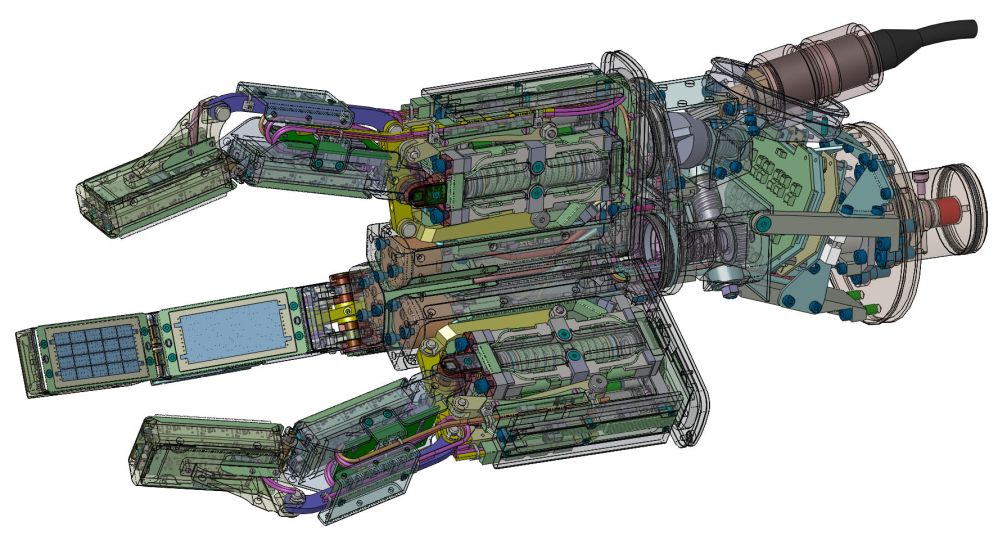
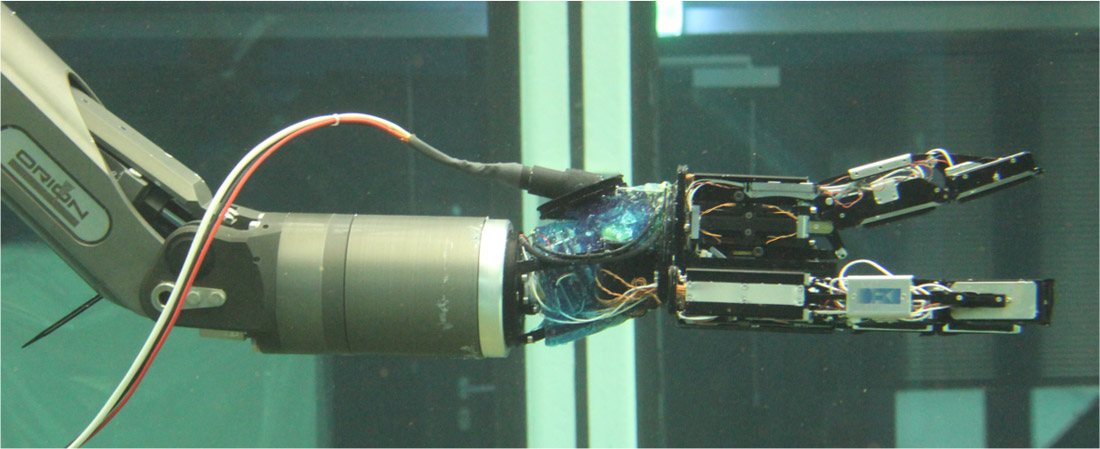
Mit dem SeeGrip Manipulator wird sich die Effizienz und das Einsatzspektrum von Tiefseemanipulatoren durch den Einsatz großflächiger Sensornetze massiv erhöhen. Neben der dadurch realisierbaren Rückkopplung von haptischen Informationen an den Operator können die taktilen Sensorfelder dazu verwendet werden, kritische Situationen – wie das Rutschen von Objekten aus der Greiferfläche – frühzeitig durch die Implementierung von autonomen Verhalten zu erkennen und entgegenzuwirken. Anders als mit herkömmlichen Manipulatorsystemen für den Einsatz unter Wasser werden durch die Verwendung von flexiblen gliedartigen Greiferstrukturen in Zusammenspiel mit der integrierten Sensorik sanfte Handhabungsvorgänge ermöglicht werden.
Um die Tiefseetauglichkeit der Komponenten untersuchen und verifizieren zu können, wird der Manipulator in einer Druckkammer im Unterwasser-Teststand Drücken von bis zu 600 bar ausgesetzt.
Videos
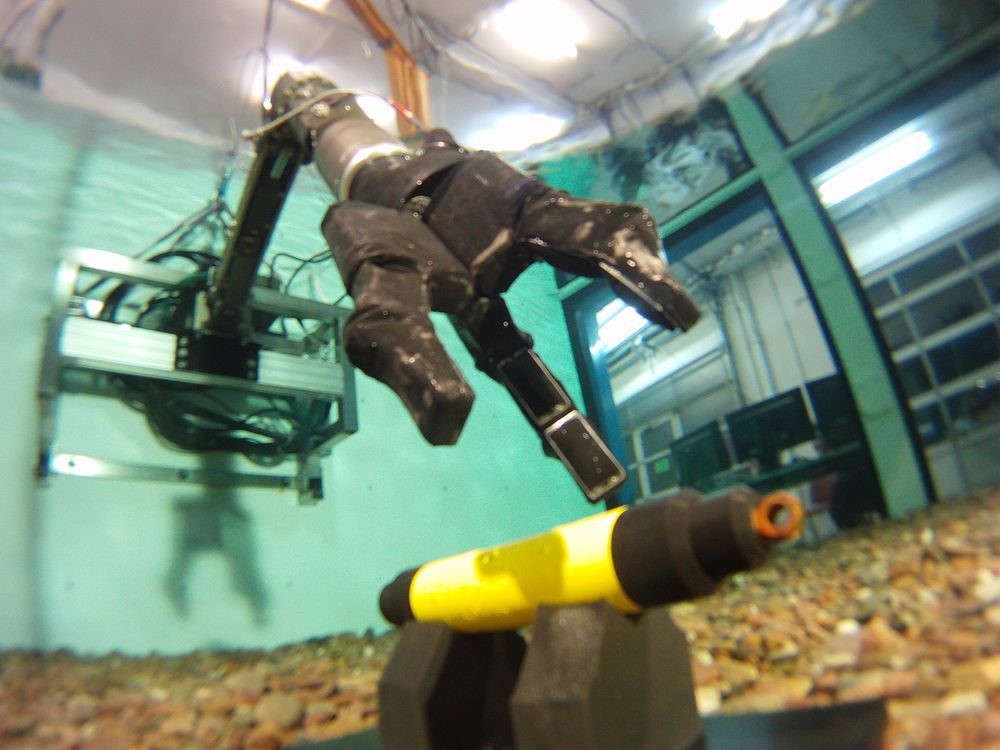
SeeGrip: Autonome Unterwasserobjektmanipulation

Diese Simulation zeigt die erfolgreiche Durchführung eines Experiments mit dem am DFKI entwickelten DFKI Greifersystem unter Umgebungsbedingungen bis 600 bar.
SeeGrip: Druckkammer