SeeGrip Manipulator
SeeGrip Manipulation System

Technische Details
| Größe: | 450 x 120 x 120 mm total (165 x 20 x 30 mm finger Module) |
| Gewicht: | 9,5 kg |
| Stromversorgung: |
12 V DC, 2 A nominal, 7 A Spitze
|
| Antrieb/ Motoren: |
Hydraulisch / Elektrisch
|
| Sensoren: |
3x 6-Achs-Kraftmessdosen
6x Piezoelektrische Sensorfelder mit 20 Sensorelementen (Spezialanfertigung)
6x Faseroptische Sensorfelder mit jeweils 324 Sensorpunkten (Spezialanfertigung)
6x Absolutencoder mit 12 Bit Auflösung
1x Inertialmesseinheit
12x relative Drucksensoren für den Hydraulikkreislauf
3x Absolutdrucksensoren für Hydraulikkreislauf und Erfassung der
Umgebungsbedingungen
26x Temperatursensoren zur Erfassung der Umgebungsbedingungen und des Systemzustandes
1x Feuchtigkeitssensor
|
| Freiheitsgrade: |
7
|
| Maximale Greifkraft pro Fingerspitze: |
20 N
|
Organisatorische Details |
|
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
SeeGrip
Autonomous underwater gripper with tactile feedback for form- and force closed object manipulation.
(09.2009- 03.2013)
Mare-IT
Information Technology for Maritime Applications
(08.2018- 11.2021)
Mare-IT
Informationstechnologie für maritime Anwendungen
(08.2018- 11.2021)
SeeGrip
Autonomer Unterwassergreifer mit taktiler Rückkopplung für form- und kraftschlüssige Objektmanipulation.
(09.2009- 03.2013)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung


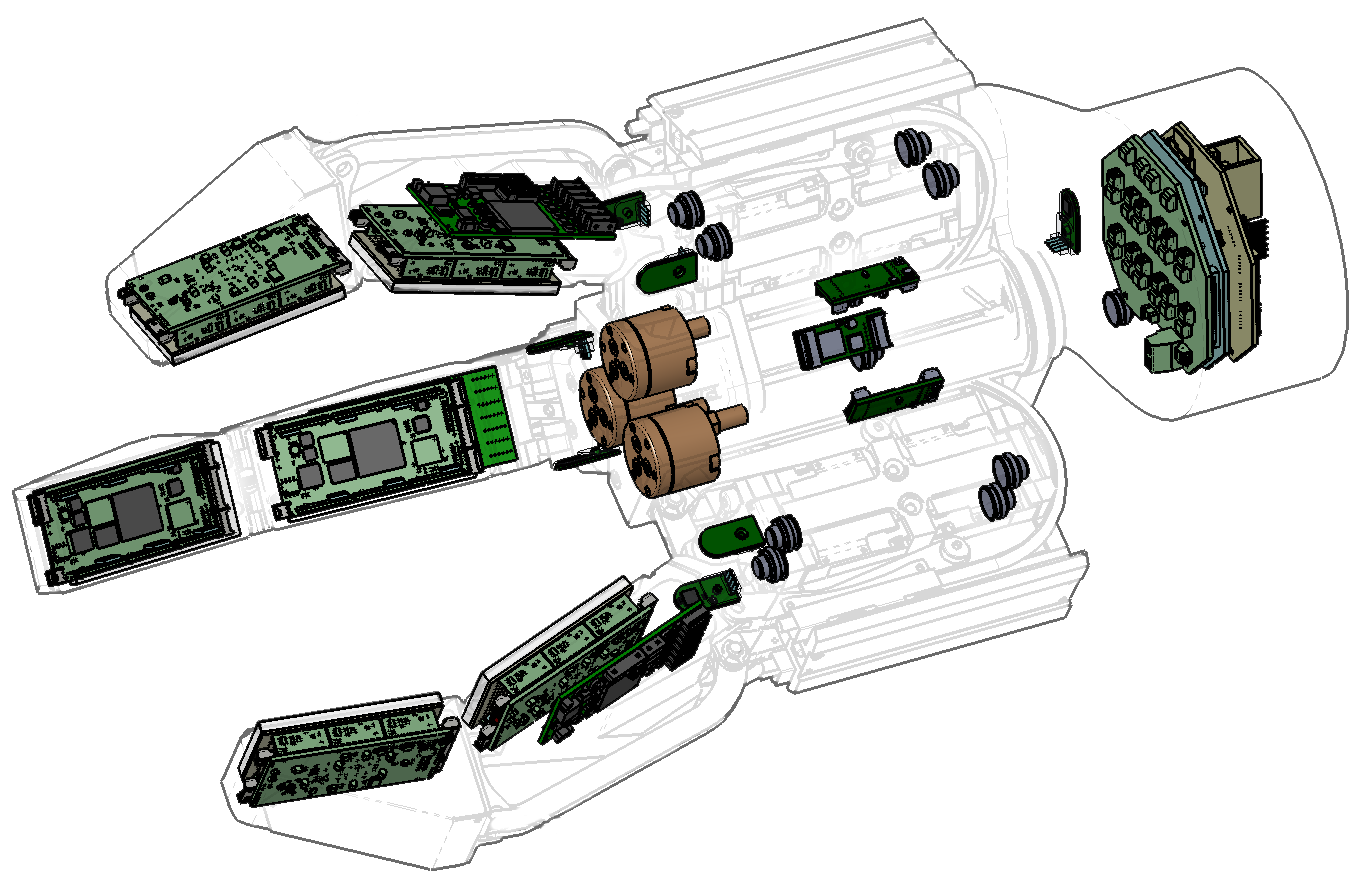
Beim SeeGripManipulationssystem handelt es sich um ein dreifingriges Greifsystem mit 7 Freiheitsgraden. Das System ist für den Einsatz unter Wasserin Tiefen bis zu 6000 m konzipiert. Eine Vielzahl von Sensoren unterschiedlicher Modalität ermöglicht die Realisierung eines taktilen Sensorsystems für die Tiefsee, welches eine der Besonderheiten dieses Greifersystems ist.
Unter erschwerten Sichtbedingungen verursacht durch auf gewirbeltes Sediment kann bis hermit Tauchrobotern nicht operiert werden. Mit dem SeeGrip Greifsystem ist die Möglichkeit geschaffen,die nähere Umgebung durch Ertasten zu erkunden und damit Informationen über die Umgebung durch Berührung zu erhalten.
Um Rückschlüsse auf das berührte Objekt zuerhalten, sind soviele Informationen wiemöglich hilfreich. Daher verfügt das Greifersystem ähnlich wie bei der menschlichen Hand über verschiedene Modalitäten die Berührung zu messen. Dynamische Sensoren ermöglichen die Identifikation von Eigenschaften der Oberflächenstruktur. Statische Kraftsensoren erfassen die Objektgeometrie und das Gewichtsverhältnis sowie die absolut einwirkenden Kräfte.
Hinzu kommen weitere Sensoren, die den Systemzustand des Greifers überwachen und deren Werte mit denen der Kraftsensorik kombiniert werden kann, um weitere Rückschlüsse auf das gegriffene Objet zuerhalten.
Insgesamt befindensich 2139 Sensorelemente im Greifer, davon sind 2082 Sensoren für die Messung von Kontaktkräftenzuständig.



