Mare-IT
Informationstechnologie für maritime Anwendungen

Im Fokus des Projekts Mare-IT steht die Frage, wie der Informationsfluss zwischen robotischen Systemen, Leitständen, Teleoperationssystemen, digitalen Avataren und betrieblichen Informationssystemen im Zeitalter der Digitalisierung realisiert werden kann. Das Szenario wird mit einem autonomen Unterwasserroboter (AUV) realisiert, welcher mit zwei Manipulatorarmen ausgestattet wird.

Projektdetails


Im Fokus des Projekts Mare-IT steht die Frage, wie der Informationsfluss zwischen robotischen Systemen, Leitständen, Teleoperationssystemen, digitalen Avataren und betrieblichen Informationssystemen im Zeitalter der Digitalisierung realisiert werden kann. Das Szenario wird mit einem autonomen Unterwasserroboter (AUV) realisiert, welcher mit zwei Manipulatorarmen ausgestattet wird.
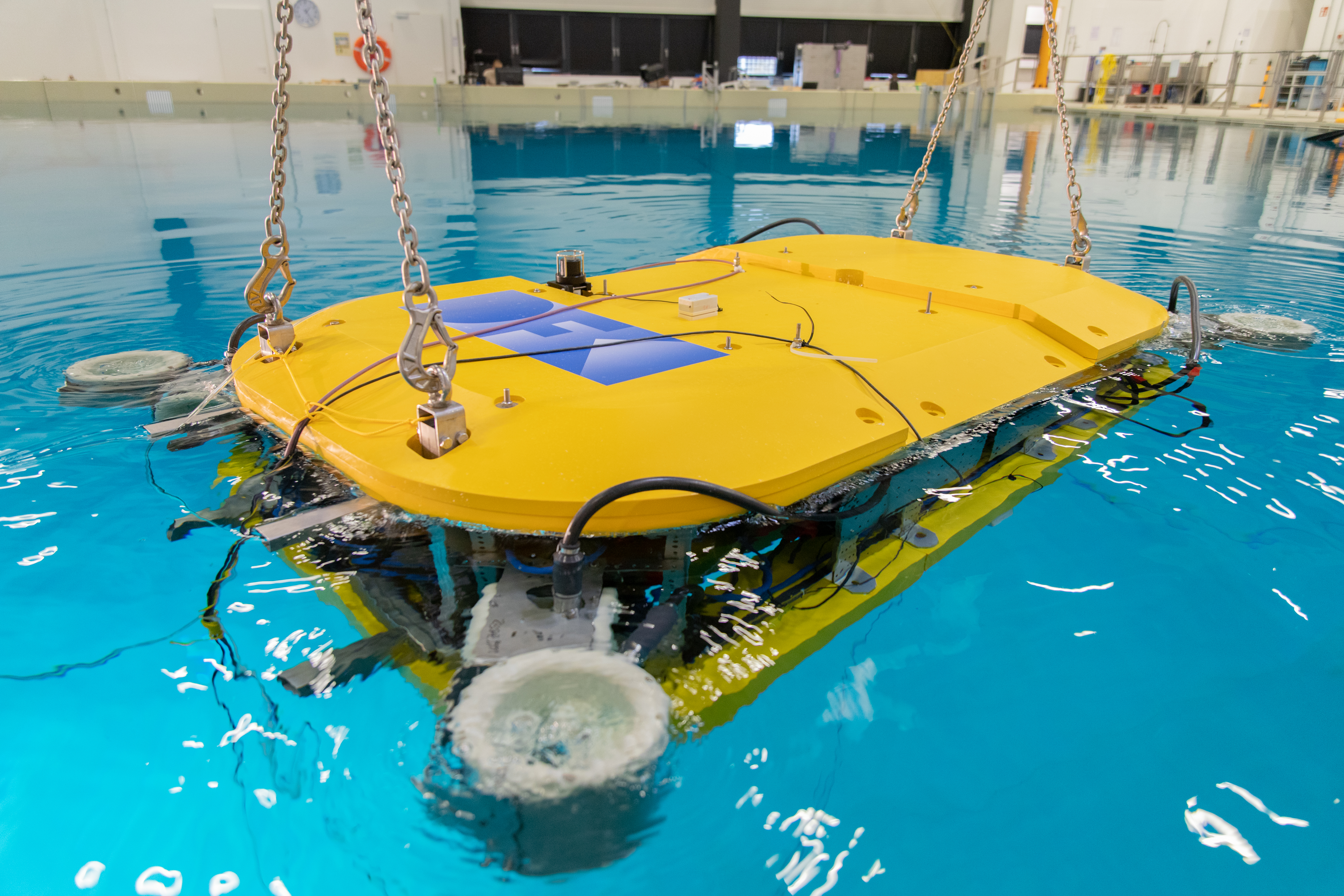
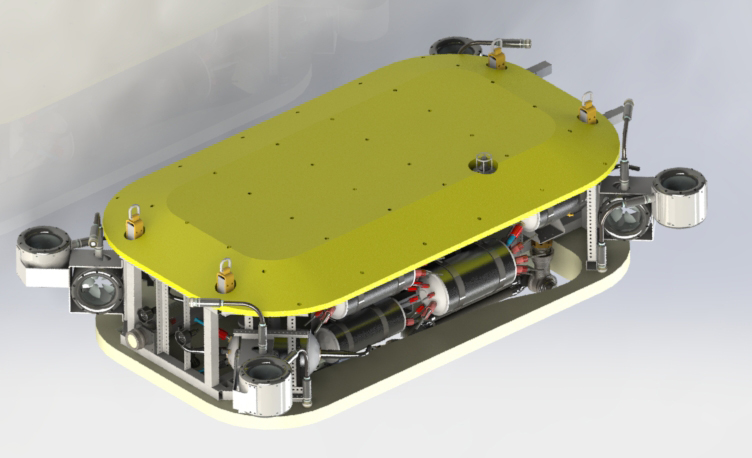
Diese Plattform wird in der Lage sein, für die Bewältigung von Manipulationsaufgaben an Unterwasserstrukturen von einem autonomen Modus in einen semi—autonomen Modus zu wechseln. Hierdurch wird die Möglichkeit eröffnet, dass AUVs zukünftig auch Aufgaben von bisher kabelgebundenen und vollständig teleoperierten Systemen (ROVs) übernehmen können. In Verbindung mit der Möglichkeit, dauerhaft am Meeresboden verbleiben zu können, stellt ein solches System eine Innovation im Bereich der Unterwasserrobotik dar.
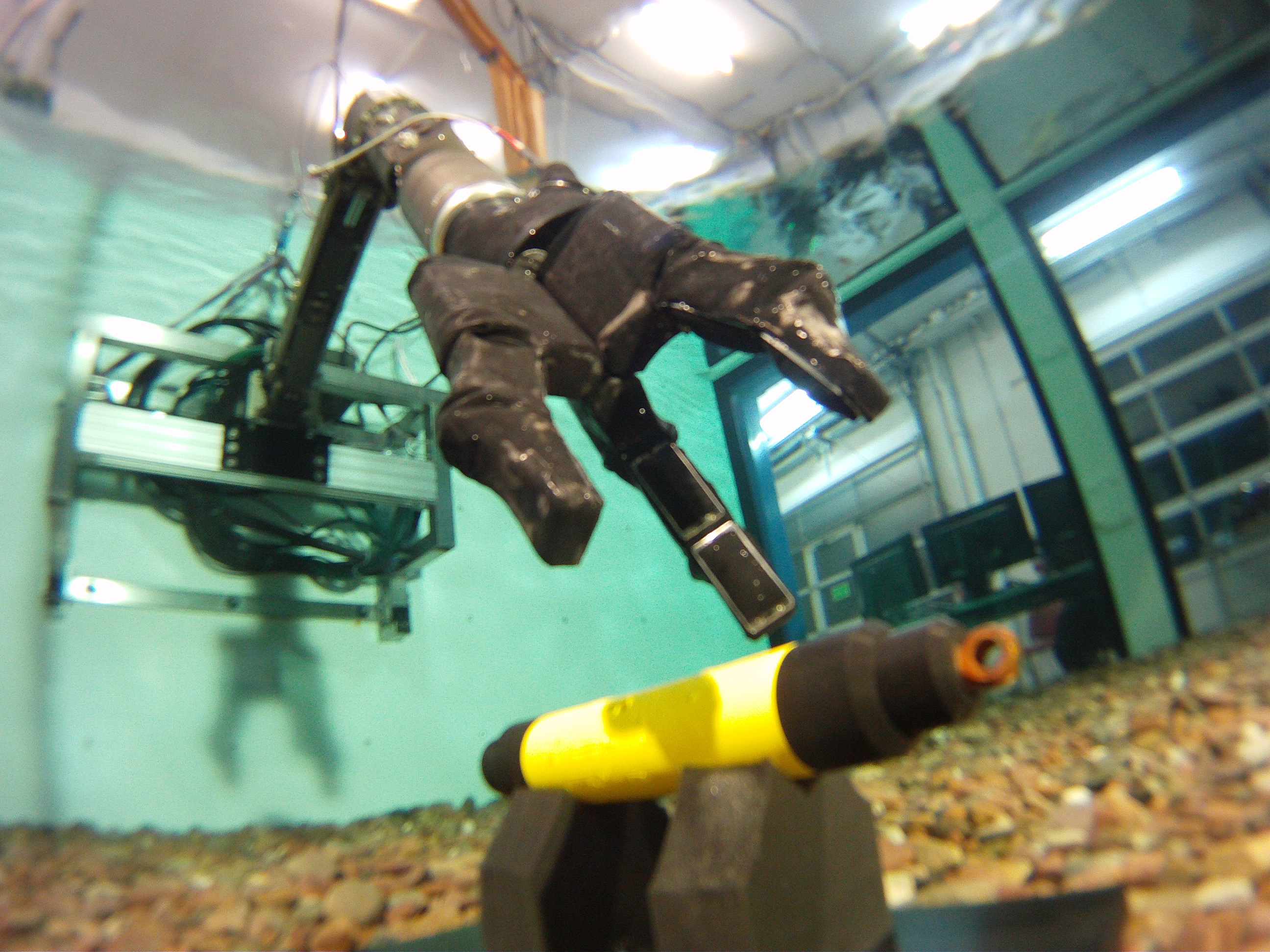
Um dieses Ziel zu erreichen sind eine ganze Reihe von wissenschaftlichen Fragestellungen zu beantworten. Diese umfassen das Systemdesign von AUVs mit Manipulatorarmen, die Regelung von Unterwasserfahrzeugen während der Handhabung von Objekten in der Wassersäule, die Aufbereitung von komplexen Sensordatenströmen in Leitständen der Operatoren sowie die Ansteuerung und Rückkopplung von Teleoperationssystemen wie bspw. Exoskeletten bei Aufgaben mit limitierter Bandbreite zur Übertragung von Informationen.
Diese Fragen werden gemeinsam mit mehreren Verbundpartnern angegangen. Die Firma Wittenstein cyber motor GmbH entwickelt im Rahmen des Projektes neuartiger Thrustersysteme, die Firma ROSEN Technology Research Center GmbH entwickelt Sensorik für die prädiktive Wartung und die Firma SAP SE untersucht die Einbindung von robotischen Systemen in betriebliche Informationssysteme.
Neben dem Robotics Innovation Center des Deutschen Forschungszentrums für künstliche Intelligenz arbeiten die Bereiche Eingebettete Intelligenz an der Entwicklung neuartiger Sensorsysteme für den Unterwasserbereich sowie der Bereich Kognitive Assistenzsysteme an intuitiven Benutzerschnittstellen.
Videos
Mare-IT: Leistungsstarke IT-Infrastruktur für Unterwasser-Wartung mit bahnbrechendem zweiarmigem AUV

Das Projekt Mare-IT konzentriert sich auf die Verbesserung des Informationsflusses zwischen Unterwasserrobotersystemen, Unterwasseranlagen und landgestützten Kontrollstationen, um Inspektionsdaten in Unternehmensinformationssysteme zu integrieren. Das angestrebte Szenario wird mit dem kürzlich entwickelten autonomen Unterwasserfahrzeug (AUV) Cuttlefish realisiert, das mit zwei Roboterarmen zur Interaktion mit Unterwasserstrukturen ausgestattet ist.