AUV Cuttlefish
Cuttlefish - Autonomes Unterwasserfahrzeug mit 2 Armen

Technische Details
| Größe: | Ø 2,8m x 2,0 m x 0,8m |
| Gewicht: | 1200kg |
| Geschwindigkeit: | 4 kn |
| Antrieb/ Motoren: |
Thruster: 8 x Außenläufer, Wittenstein Cyber Motor GmbH, Schub 500N, Tauchtiefe 6000m
|
| Gesamtsystem Tauchtiefe: |
Initial 300m, abhängig von der Konfiguration
|
| Beweglichkeit: |
6 DOF frei wählbare Orientierung und Fahrtlage
|
| Manipulation: |
zwei tiefseetaugliche Arme (druckkompensiert):
4-DOF Docking-Arm mit Kugelkopf-Greifer
• Länge ausgestreckt 1.710mm
• Integrierte WLAN-Antenne
• Zuglast: max. 1kN
6-DOF Arbeitsarm
• Länge ausgestreckt ohne Greifer: 1.680mm
• Payload: 7kg
|
| Akku / Kapazität: |
2x LiFePo 5 KWh 50V
|
| USBL: |
Evologics S2CR 18/34
|
| DVL: |
Rowe Technology SeaPilot 1200kHz
|
| IMU: |
iXblue Phins C3 (faseroptisch)
|
| Drucksensor: |
Absolutsensor Keller PAA-33X 10bar
|
| Hindernisvermeidung: |
Tritech Micron DST CHIRP Sonar
|
| Kameras: |
3 x Basler ACE 2040-25GC (1x vorne, 2x unten Stereo)
|
| Beleuchtung: |
2 x Bowtech LED-K-Series Scheinwerfer
|
| Boardrechner: |
Intel i7-8700 @ Kontron mITX-CFL-S (Navigation, KI, Evaluation), Supermicro X10SDV mITX (Storage, Backup), 3x Odroid XU4 (lowlevel behavior)
|
Organisatorische Details |
|
| Fördergeber: | Bundesministerium für Bildung und Forschung |
| Förderkennzeichen: | Gefördert vom BMBF, Förderkennzeichen O1lS17029A |
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
CleanSeas
New robotic manipulation techniques and AI algorithms for the precise handling of objects in the sea using the example of ammunition dumps / UXO
(01.2023- 05.2027)
CleanSeas
Neue robotische Handhabungstechniken und KI-Algorithmen zur präzisen Handhabung von Objekten im Meer am Beispiel von Munitionsaltlasten
(01.2023- 05.2027)
Mare-IT
Informationstechnologie für maritime Anwendungen
(08.2018- 11.2021)
|
Systembeschreibung


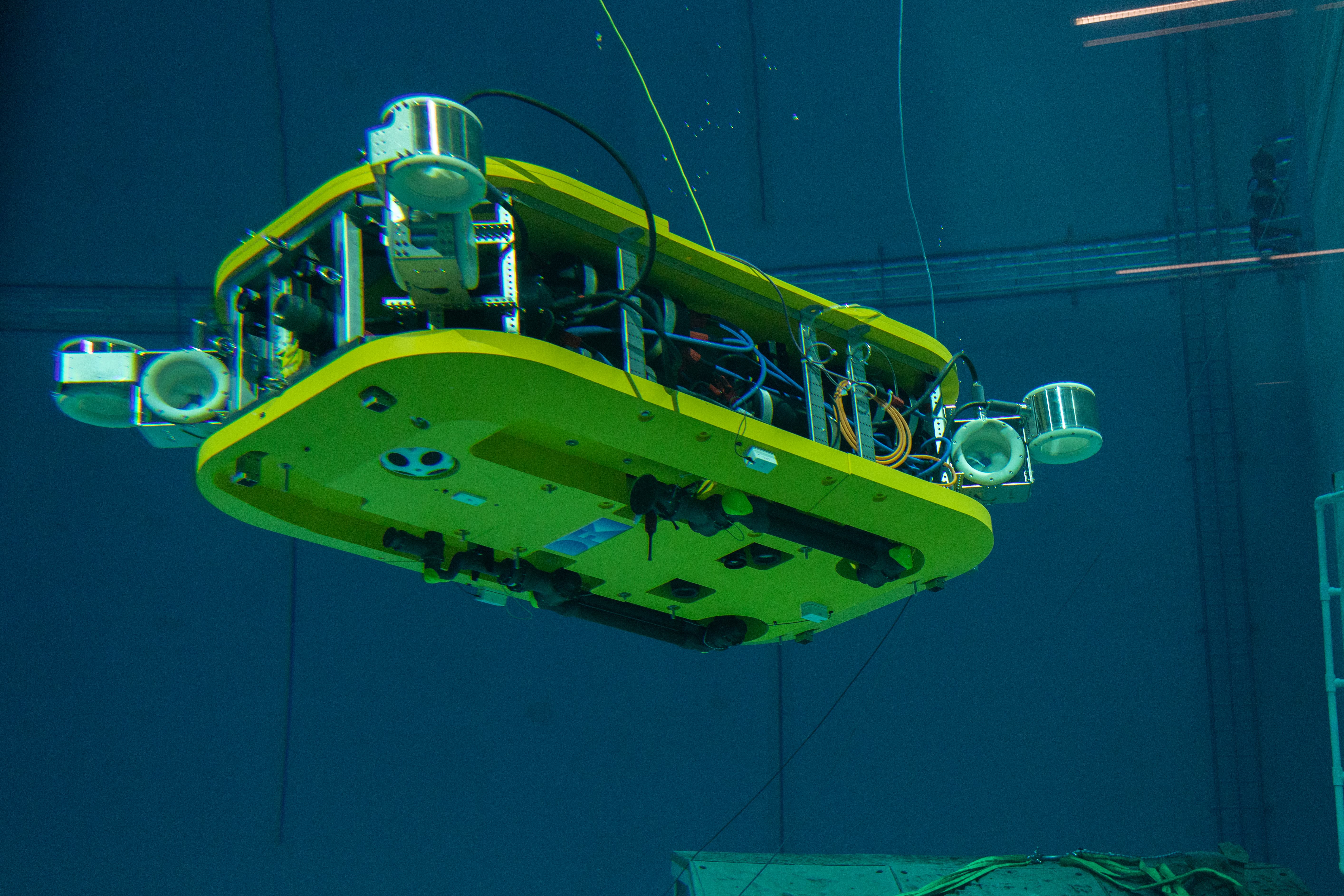

Das autonome Unterwasserfahrzeug (AUV) Cuttlefish ist als frei in der Wassersäule positionierbares Interventions-AUV entworfen. Aufgrund der Thruster-Anordnung und durch die Möglichkeit, den Schwerpunkt und Auftrieb während eines Tauchgangs zu verändern, ist es in der Lage während der Manipulation von Objekten Unterwasser mit seinen zwei an der Bauchseite angebrachten tiefseetauglichen Manipulatoren beliebige Orientierungen einzunehmen und stabil zu halten. Initiale Applikationsszenarien sind die berührende Inspektion von Gründungsstrukturen an Windenergieanlagen, Wasserstoffpipelines und weiterer Unterwasseranlagen wie z.B. Ventile oder Pumpen in Offshore-Feldern.
Neben dem vollautonomen Einsatz ist es möglich, das Fahrzeug mittels einer Glasfaser in einem hybriden Modus zu betreiben, wobei die Stromversorgung im System integriert ist, das Fahrzeug aber für kritische Operationen an Unterwasserstrukturen ferngesteuert bzw. überwacht werden kann. Hierzu verfügt das Fahrzeug neben den Manipulatoren über eine Vielzahl von optischen und akustischen Sensoren zur Umgebungswahrnehmung.
Videos
CIAM: Erkundung der Herausforderungen von Andockvorgängen mit einem ferngesteuerten AUV
Autonome Unterwasserfahrzeuge (AUVs) werden bereits zur Inspektion von Strukturen in tiefen Gewässern eingesetzt. Noch werden die Systeme jedoch von großen Versorgungsschiffen begleitet, auf See ausgesetzt und wieder eingeholt - ein riskantes und zugleich kostspieliges Unterfangen. Gemeinsam mit Partnern aus Industrie und Forschung entwickelt das DFKI im Verbundprojekt CIAM ("Cooperative Development of a Comprehensive Integrated Autonomous Underwater Monitoring Solution") intelligente AUVs. Diese Systeme sind in der Lage, große Entfernungen zu überwinden und Tiefseeanlagen an verschiedenen Standorten zu überwachen, ohne dass zusätzliche Schiffe eingesetzt werden müssen. Die Energieversorgung (und perspektivisch auch das Auffangen liegengebliebener Unterwasserfahrzeuge sowie der Informationsaustausch) soll durch angetriebene Ladestationen sichergestellt werden, die je nach Bedarf ausgesandt werden und autonom an die Systeme andocken können.
Das Video zeigt Versuche im großen Salzwasserbecken der Maritimen Forschungshalle des DFKI in Bremen. Bis die eigentliche Hardware zur Verfügung steht, dient das technisch ähnlich ausgestattete AUV Cuttlefish als Platzhalter für die Ladestation und das Rohr als Platzhalter für das Zielfahrzeug. Der Andockvorgang, der hier noch manuell erfolgt, ist selbst in ruhigen Gewässern ein hochkomplexer Vorgang. Um im Nachhinein zu überprüfen, wie genau dieser Vorgang funktioniert hat, können die Positionen des Tintenfisches und der Röhre mit Hilfe eines Qualisys Motion-Tracking-Systems live verfolgt werden. Dazu werden mehrere reflektierende Kugeln an den Oberflächen der Systeme angebracht, die von insgesamt zwölf Kameras mit UV-Strahlern verfolgt werden können.
Mare-IT: Leistungsstarke IT-Infrastruktur für Unterwasser-Wartung mit bahnbrechendem zweiarmigem AUV

Das Projekt Mare-IT konzentriert sich auf die Verbesserung des Informationsflusses zwischen Unterwasserrobotersystemen, Unterwasseranlagen und landgestützten Kontrollstationen, um Inspektionsdaten in Unternehmensinformationssysteme zu integrieren. Das angestrebte Szenario wird mit dem kürzlich entwickelten autonomen Unterwasserfahrzeug (AUV) Cuttlefish realisiert, das mit zwei Roboterarmen zur Interaktion mit Unterwasserstrukturen ausgestattet ist.