CManipulator
An Autonomous Dual Manipulator for Deep-Sea Inspection and Maintenance

The CManipulator-Project deals with the development, the evaluation, and the construction of the first autonomous dual manipulator system for inspection and service tasks. In this project, methods for visual detection of underwater objects and for autonomous manipulator control will be developed. It is planned to use this system for future underwater inspection and maintenance tasks which include autonomous picking, placing, and plugging.
| Duration: | 01.09.2006 till 30.09.2009 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | Federal Ministry of Economics and Technology |
| Grant number: | The CManipulator project (Sept. 2006-2010) is funded by the German Ministry of Economics (BMWI), Grant No. 03SX231). |
| Application Field: | Underwater Robotics |
| Related Projects: |
ROV-Hovering
Autonomous Hovering Using an ROV
(11.2006-
08.2007)
VI-Bot
Virtual Immersion for holistic feedback control of semi-autonomous robots
(01.2008-
12.2010)
|
| Related Robots: |
Orion
Schilling Orion 7P
|

Project details
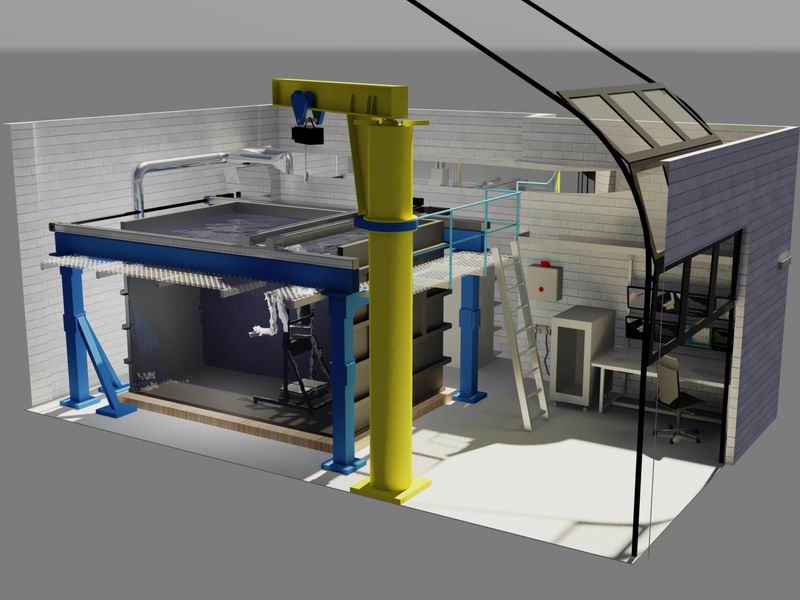


The goal of the CManipulator project is the development of an autonomous and modular dual-arm underwater-manipulator. The system will be designed so that it can be easily be adapted to existing and future underwater vehicles as an additional payload. An increasing trend in the offshore industry is to mining deep-sea resources, e.g. oil or mangan.
At present this is a very expensive endeavor. Especially, cost-efficient 24-hour systems for the inspection and maintenance of deep-sea production facilities are needed. In the last decades more and more ROVs (Remotely Operated Vehicles) with tele-operated manipulators have been deployed. Because of their permanent connection to the surface, they are inherently cost-intensive.
Furthermore, highly trained personnel is necessary for the control and monitoring of these vehicles, which is mostly done from special ships. Thus, the running costs for installation and maintenance of underwater facilities are very high. By using a new autonomous manipulator system like CManipulator, these costs can be significantly reduced in the future.
CManipulator will be the first deep-sea underwater robot able to autonomously detect previously defined objects, grasp them and set them down or connect them to other objects. The complete system will either act completely autonomously or semi-autonomous with an operator as supervisor.
It will be able to grasp a range of different objects up to a weight of 30kg in water. The project mainly focuses on objects with the following properties:
- Cylindrical objects which have the form of underwater- transponders
- Objects with a handle enabling them to be grasped by CManipulator
To further enhance the relevance of the project, it is planned to autonomously connect electrical power connectors. This would allow autonomous docking of underwater vehicles by CManipulator and could broaden the utility of AUVs and ROVs that use a CManipulator.
Autonomous manipulation is a critical feature for deep-sea applications, therefore it is planned to transfer the results on a deep-sea capable vehicle.
The CManipulator project (Sept. 2006-2010) is funded by the German Ministry of Economics (BMWI), Grant No. 03SX231).
The CManipulator project was successfully finished with the open water test in October 2010. CManipulator is able to autonomous grab object, close underwater connectors and to compensate movements of the base vehicle.
Videos
CManipulator: Motion compensation

Motion compesation of base frame movement by the CManipulator System.
CManipulator: GISMA plug static

Autonomous Underwater-Plugging of a wet mateable GISMA plug.
CManipulator: Free Water Test

This free water test was in Eckernförde
CManipulator: Autonomous underwater manipulation

Autonomous gripping of an underwater transponder by the CManipulator System.