ROV-Hovering
Autonomous Hovering Using an ROV

State-of-the-art sensor technology merged with sonar and inertial system's data are employed to develop a system allowing the autonomous hovering of an ROV in front of a structure. It will be used to support ROV pilots during handling tasks in that it enables them to position and hover an ROV in relation to an object or a structure.
| Duration: | 01.11.2006 till 31.08.2007 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Application Field: | Underwater Robotics |
| Related Projects: |
CManipulator
An Autonomous Dual Manipulator for Deep-Sea Inspection and Maintenance
(09.2006-
09.2009)
|
Project details


With the aid of camera-based virtual servoing and merging of values from one or several 6D Inertial systems and a sonar, the project aims at enabling the DFKI-LBV150B2 ROV to hover in front of an underwater structure.
This means that the operator will place the LBV in front of an underwater structure by hand and subsequently activate the hover control. As a result, the LBV remains hovering in front of the structure at the distance and orientation determined by its original position. Disturbances caused by external influences such as currents or movement of the structure will be compensated autonomously. Furthermore, by using the hover control the operator may change the position of the ROV through renewed control commands.
The LBV-camera which is connected to a computer system that evaluates images and transmits control commands to the LBV thruster will be the principal sensor for the detection of disturbances. In addition, in a second step the data of one or several inertial systems, resp., and a sonar for distance reading will be merged in order to stabilize the reaction. Furthermore, auto-heading and auto-depth functions of the LBV will be used at the beginning of the job. In the event that the resolution of the internal camera should not suffice to place the necessary data at the disposal of the visual servoing algorithms, one of the high-resolution cameras of the CManipulator project may be used.
Videos
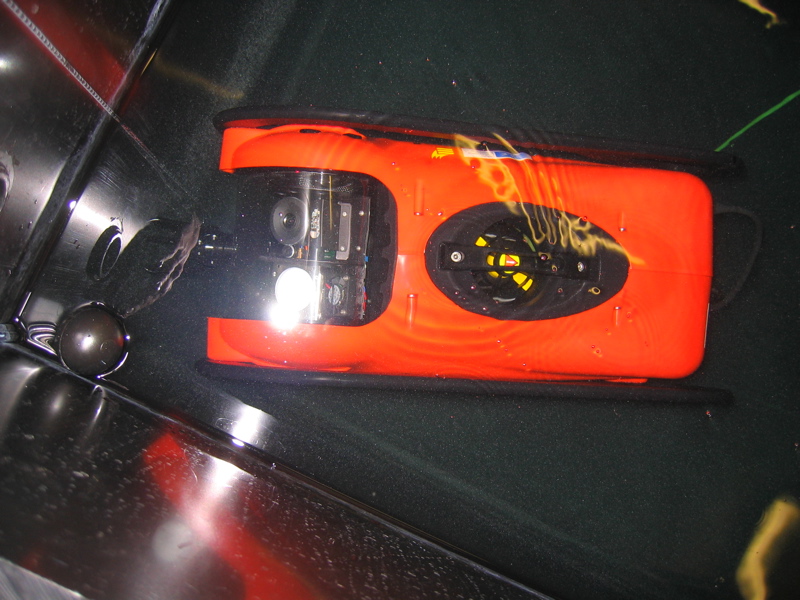
ROV: Autonomous hovering

LBV150 serves as a test platform for new underwater vehicle systems in the facilities at the DFKI and outdoor experiments.