Coyote III

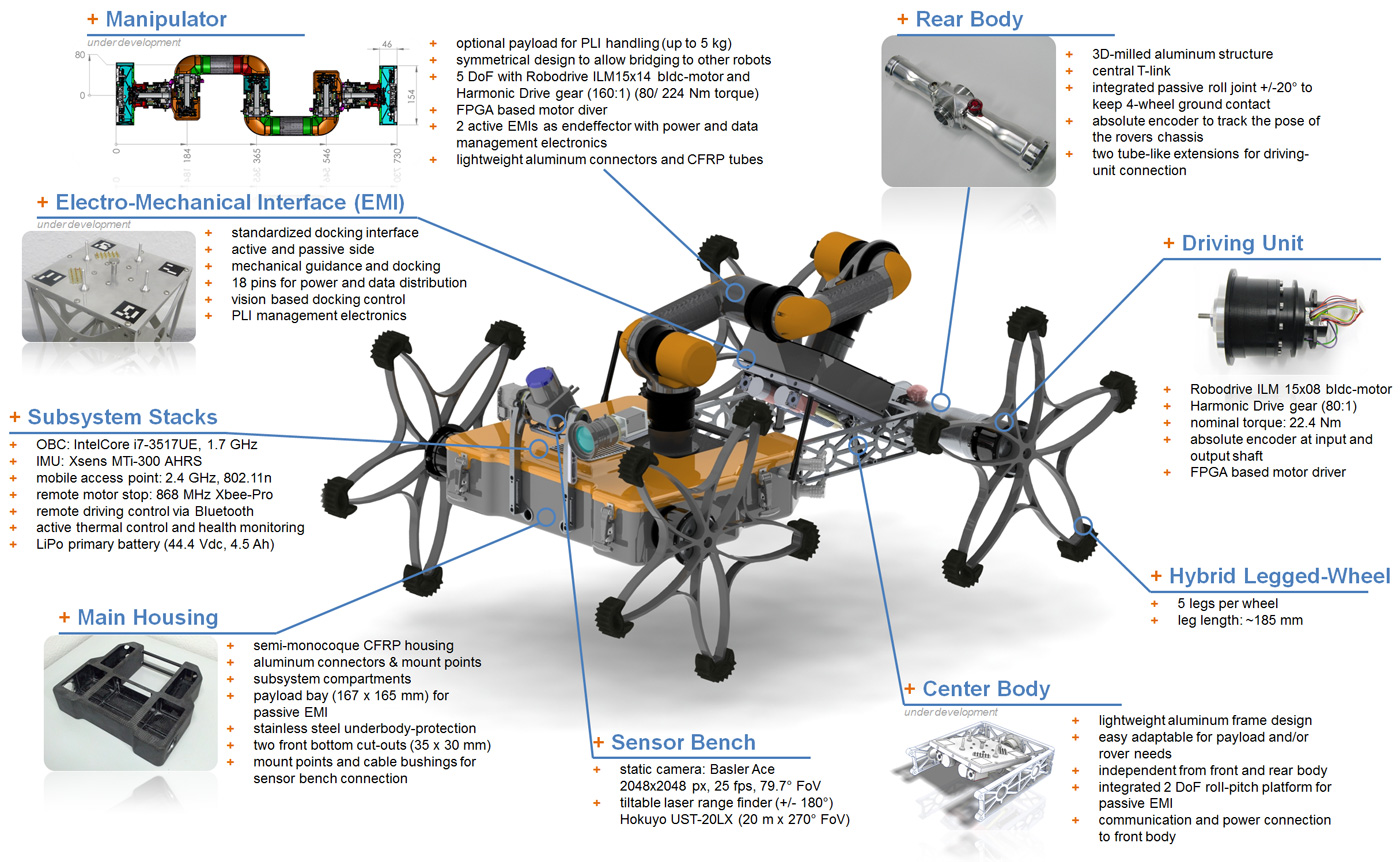
Technische Details


Systembeschreibung



Coyote III ist ein Mikro-Rover, welcher eine hohe Mobilität in unstrukturiertem Gelände aufweist. Mit der roboterinternen Stromversorgung, den On-Board Sensoren und Computer ist es möglich, autonome Explorationsaufgaben durchzuführen. Das Kommunikationssystem erlaubt es dem Rover mit anderen Systemen zu kooperieren. Coyote III wird mit zwei standardisierten elektro-mechanischen Schnittstellen ausgerüstet, welche das Andocken zusätzlicher Nutzlastelemente, wie zum Beispiel einem Manipulator oder standardisierte Nutzlastcontainer, ermöglichen. Durch die leichte und robuste Bauweise kann Coyote III mit mehreren Kilogrammen Nutzlast beaufschlagt werden. Die modular gestaltete Bauweise des Rovers erlaubt es, die Struktur an nutzlastspezifische Anforderungen anzupassen.
Coyote III wird im Rahmen des Projekts TransTerrA entwickelt, welches zum Ziel hat, eine logistische Kette, basierend auf einem heterogenen Team aus mobilen und stationären Robotern, zu errichten. Hierbei wird die modulare Roverplattform Coyote III als Shuttle Rover eingesetzt, um innerhalb der logistischen Kette zu agieren und einen Transport von Nutzlastmodulen zwischen dem Explorationsrover und verschiedenen stationären Knotenpunkten zu realisieren.
Coyote III ist eine direkte Weiterentwicklung des Coyote II Rovers, welcher bereits erfolgreich getestet und als Micro Scout Rover eingesetzt wurde. Das Gestaltungskonzept und die Konstruktion von Coyote III basiert auf den Lessons Learned von Coyote II und dem in TransTerrA zugrunde gelegten Referenzszenario. Coyote III wurde in einer modularen aber leichten Bauweise gestaltet, welche es erlaubt zusätzliche Nutzlasten an der Plattform zu integrieren. Um das Modularitätskonzept der logistischen Kette umzusetzen, wird Coyote III mit zwei standardisierten elekrto-mechanischen Schnittstellen ausgerüstet. Diese erlauben es zusätzliche Nutzlastmodule an den Rover anzudocken und so potentiell die Funktionalität des Gesamtsystems zu erweitern. Zum Handhaben der Nutzlastmodule wurde ein modular einsetzbarer Manipulatorarm entwickelt, welcher über die Schnittstellen an Coyote III angedockt werden kann.
Neben dem primären Einsatzszenario zur Exploration extraterrestrischer Körper, kann Coyote III auch für terrestrische Anwendungen zum Beispiel im Bereich der zivilen Sicherheit eingesetzt werden. Hier zeichnet sich das System vor allem durch die kompakte Bauweise und hohe Mobilität aus. Weiterhin erlauben die modulare Bauweise beziehungsweise die vorhandenen elekro-mechanischen Schnittstellen den Rover je nach Einsatzszenario um- beziehungsweise aufzurüsten.
Videos
Persim: Autonome Navigation am Steilhang eines Kraters

Die autonome Navigation von Coyote 3 wird beim Befahren eines Steilhangs gezeigt. Die Karte unten rechts zeigt die befahrbaren Bereiche in grün und die Hindernisse in rot. Der geplante Pfad, dem gefolgt werden soll, wird ebenfalls in der Visualisierung.
CoRob-X: DFKI testet Lavahöhlen-Erkundung durch autonome Roboterteams für zukünftige Mondmissionen

Lavahöhlen auf dem Mars und insbesondere auf dem Mond sind nicht nur für Exogeologen und andere Weltraumforscher interessant, sondern könnten auch als Lagerräume oder sogar als Lebensräume für künftige menschliche Siedlungen genutzt werden. Die Frage ist, wie diese riesigen Hohlräume unter der Mondoberfläche zugänglich gemacht und erforscht werden können, ohne das Leben der Astronauten zu riskieren.
Hier kommen Roboter, oder besser gesagt Roboterteams, ins Spiel. In Zukunft könnten mehrere kooperierende Roboter die Oberfläche über einer Lavaröhre erforschen und sogar die Höhle von innen betreten und erkunden. In CoRob-X haben wir in einer mondanalogen Mission auf Lanzarote demonstriert, wie das funktionieren könnte. Mit der gemeinsamen Anstrengung von Forschern aus fünf europäischen Mitgliedsstaaten und der Finanzierung durch das H2020-Programm der Europäischen Kommission hatten wir ein robotisches Explorationsteam aus drei autonomen Robotern entwickelt. Im Januar/Februar 2023 konnte das CoRob-X-Roboterteam alle vier Phasen einer Erkundungsmission in einer Lavaröhre auf dem Mond erfolgreich abschließen. Aber sehen Sie selbst...
Coyote III Demonstriert ein robotisches Such- und Rettungsszenario

Coyote III – Ein Mikro Rover der ursprünglich für die Weltraumexploration entwickelt wurde, hat seine Vielseitigkeit bereits in diversen Szenarien gezeigt. Der Rover besticht hierbei durch hohe Mobilität und Flexibilität, um alle Situationen zu meistern.
Neben dem Weltraum kann Coyote III auch für Such- und Rettungsaufgaben (SAR) auf der Erde eingesetzt werden. Über die Kamera und den Laserscanner erhält der Fahrer einen klaren Überblick über die Umgebung und kann den Rover sicher bedienen. Durch die modulare Systemarchitektur können verschiedene Sensor- und Nutzlastmodule an den Rover angeschlossen werden. Dies ermöglicht es die Rettungsteams in unterschiedlichen Situationen zu unterstützen und die Sicherheit ihrer Arbeit zu erhöhen. Hierbei kann Coyote III auch völlig autonom eingesetzt werden und ausgedehnte Gebiete erkunden.
Zusätzlich zur Kartierung und visuellen Lageerfassung ist die Detektion und Kartierung von Gefahrstoffen ein wichtiger Bestandteil für den SAR Einsatzbereich. Zur Demonstration dieser Eigenschaften wurde ein beispielhaftes Umweltsensormodul konzipiert und in ein modulares Nutzlastmodul integriert. Das Sensormodul ist mit verschiedenen Gassensoren sowie Temperatur- und Luftfeuchtigkeitssensoren ausgerüstet.
Eine derartige Sensorausrüstung kann zum Beispiel dazu eingesetzt werden Gaslecks zu identifizieren oder für das Einsatzpersonal gefährliche Kohlenmonoxid- oder Faulgasbelastungen zu detektieren. Während seiner Fahrt erzeugt der Rover automatisch eine Umgebungskarte und trägt die detektierten Umweltparameter, wie zum Beispiel eine Gaskonzentration, hierin ein.
Coyote III: Integration der Subsysteme

Das Video zeigt den Aufbau von Coyote III mit den dedizierten Subsystemen und präsentiert ihre Hauptmerkmale. Coyote III ist ein Mikro-Rover, der eine hohe Mobilität in unstrukturiertem Gelände aufweist. Dank der roboterinternen Stromversorgung, den On-Board Sensoren sowie einem On-Board Computer ist es ihm möglich, Explorationsaufgaben autonom durchzuführen. Zudem erlaubt das Kommunikationssystem dem Rover, mit anderen Systemen zu kooperieren. Coyote III wird mit zwei standardisierten elektromechanischen Schnittstellen ausgerüstet, welche das Andocken zusätzlicher Nutzlastelemente, wie z.B. standardisierter Nutzlastcontainer oder eines Manipulators, ermöglichen. Durch die leichte und robuste Bauweise kann Coyote III mit mehreren Kilogramm Nutzlast beladen werden. Aufgrund der modular gestalteten Bauweise ist der Rover weiterhin in der Lage, seine Struktur an nutzlastspezifische Anforderungen anzupassen.
Field Trials Utah: Roboter-Team simuliert Marsmission in Utah

Eine karge, felsige Wüstenlandschaft und keine Menschenseele weit und breit – um den unwirtlichen Bedingungen auf dem Roten Planeten möglichst nahe zu kommen, testeten Wissenschaftler des Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) vom 24. Oktober bis 18. November 2016 die Kooperation verschiedener Robotersysteme in der Halbwüste des amerikanischen Bundesstaates Utah.
TransTerrA: Coyote III Kraterversuch

Coyote III meistert eine 45° steile Kraterwand im künstlichen Mondkrater.
TransTerrA: Der Roboter Coyote III im Schnee

Beobachte Coyote III wie er sich in tiefem Schnee im unwegsamen Gelände bewegt
Coyote III: Erster ferngesteuerter Lauf im Außengelände

Initialer ferngesteuerter Lauf von Coyote III im DFKI Sandfeld mit runden Rädern.