CoRob-X
Cooperative Robots for Extreme Environments

Das Projekt CoRob-X entwickelt und demonstriert Basistechnologien für Multi-Agenten-Roboterteams. Die primäre Zielanwendung ist die Erkundung planetarer Oberflächen, mit einem Fokus auf schwer zugängliche Bereiche. CoRob-X baut auf der vom Projektkonsortium bereitgestellten Roboterhardware und den im Rahmen des SRC Space Robotics Technologies entwickelten Software-Bausteinen auf. Diese Bausteine werden wiederverwendet und erheblich erweitert, um ein Multi-Agenten-Explorationsteam von Robotern zu unterstützen.

Projektdetails


Unbemannte mobile Explorationsrover sind in der Vergangenheit sowohl auf dem Mond als auch auf dem Mars erfolgreich gelandet. Weitere Robotermissionen sind geplant, wie z. B. die Exomars-Mission der ESA, und schon heute sind Roboter die wichtigsten Enabler für die Erkundung extraterrestrischer Planetenoberflächen. In Zukunft wird die Rolle von Robotern bei planetaren Missionen sogar noch zunehmen. Die bemannte Raumfahrt ist übermäßig teuer und Robotermissionen versprechen ein viel besseres Verhältnis zwischen wissenschaftlichem Ertrag und Kosten. Selbst wenn irgendwann Menschen zum Mond oder sogar zum Mars geschickt werden, werden Roboter zur Vorbereitung des Bodens und zur Unterstützung vor Ort benötigt (Global Exploration Roadmap 2018).
Doch obwohl moderne Explorationsrover wie der Curiosity-Rover der NASA Meisterwerke robuster Technik sind, fehlen ihnen noch viele der Fähigkeiten, die in Zukunft für effiziente robotische Explorations- und Unterstützungsmissionen benötigt werden. Dies gilt insbesondere für ihre Fortbewegungsfähigkeiten, Entscheidungsautonomie und die Fähigkeit, kooperierende Multi-Roboter-Teams zu bilden.
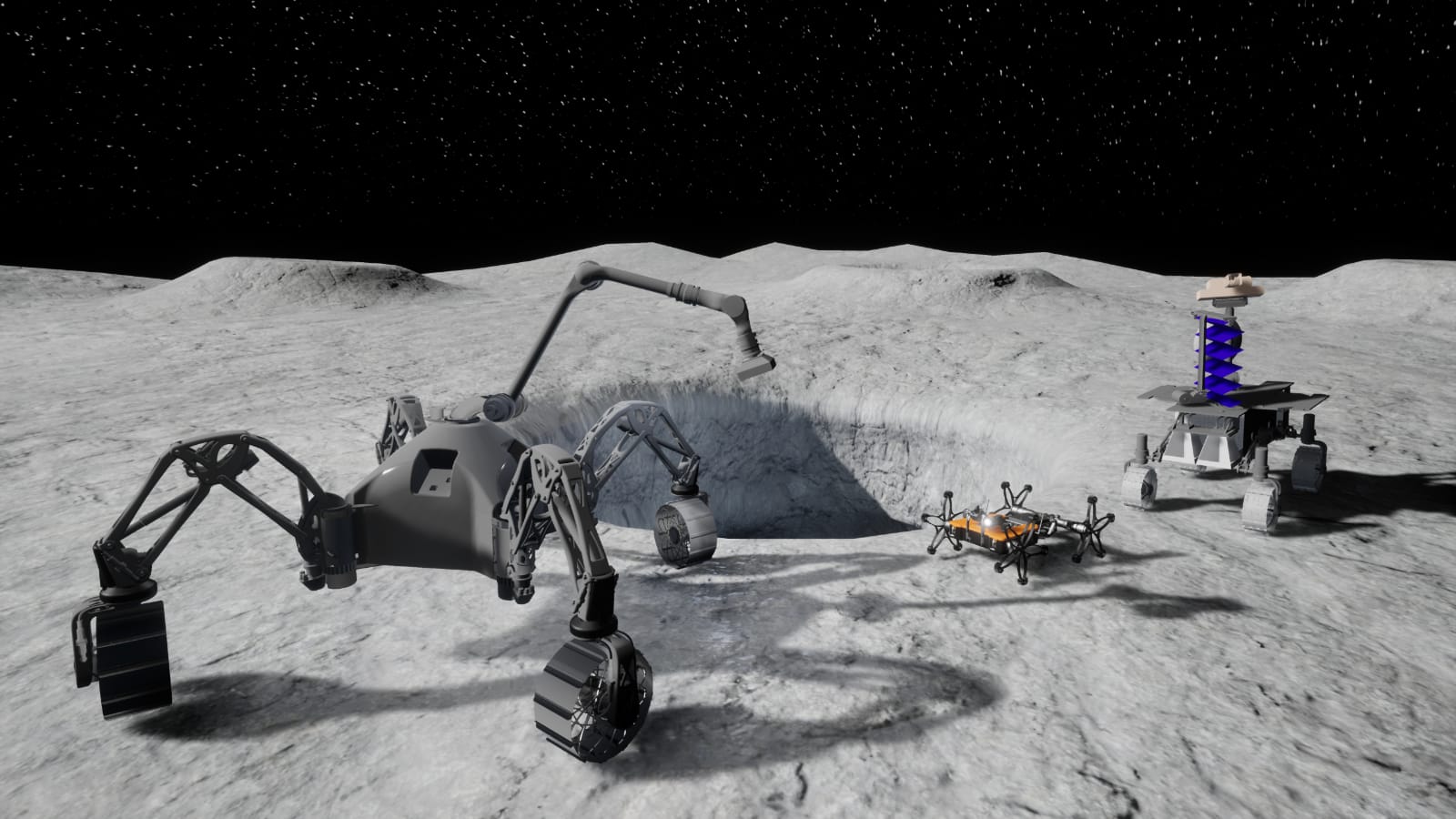
Das übergeordnete Ziel von CoRob-X ist es, ein fortschrittliches robotisches Explorationssystem (ADRES) zu entwerfen, zu implementieren und zu demonstrieren, das zeigt, wie, basierend auf den aktuellen SoA in Raumfahrt- und terrestrischen Robotertechnologien und mit besonderem Fokus auf den Technologien, die aus den operationa-Grants resultieren, die durch das H2020 Strategic Research Cluster (SRC) Space Robotics Technologies finanziert werden, ein Team von autonomen und kooperierenden Robotern sehr schwer zugängliche Bereiche auf planetaren Oberflächen erreichen und einen wissenschaftlichen Ertrag erzielen kann, der für einen einzelnen Roboter bisher unmöglich ist. CoRob-X wird die bestehende SRC-Technologie in Bereichen wie Fortbewegung, Wahrnehmung und Lokalisierung, Führung und Entscheidungsfindung verbessern und die Fähigkeiten des Roboterteams in einem analogen Szenario auf den Kanarischen Inseln demonstrieren, das auf die Erkundung von Lavaröhren abzielt, was eines der wichtigsten Ziele für die Erforschung des Mondes ist.
CoRob-X wird demonstrieren, wie selbst mit der aktuellen SoA in der Robotik zukünftige robotische Explorationsmissionen die notwendigen Fähigkeiten in den Bereichen Fortbewegung, Entscheidungsautonomie und Kooperation bieten können. CoRob-X wird kritische Technologien identifizieren, die aktuelle SoA (sowohl in der Weltraum- als auch in der terrestrischen Robotik) gründlich evaluieren, Lücken in der Technologie und im Wissen identifizieren und diese Lücken, wo nötig, füllen, um eine öffentlichkeitswirksame Demonstration sowohl einer hochrelevanten wissenschaftlichen Weltraummission als auch eines terrestrischen Anwendungsfalls zu ermöglichen.
Videos
CoRob-X: DFKI testet Lavahöhlen-Erkundung durch autonome Roboterteams für zukünftige Mondmissionen

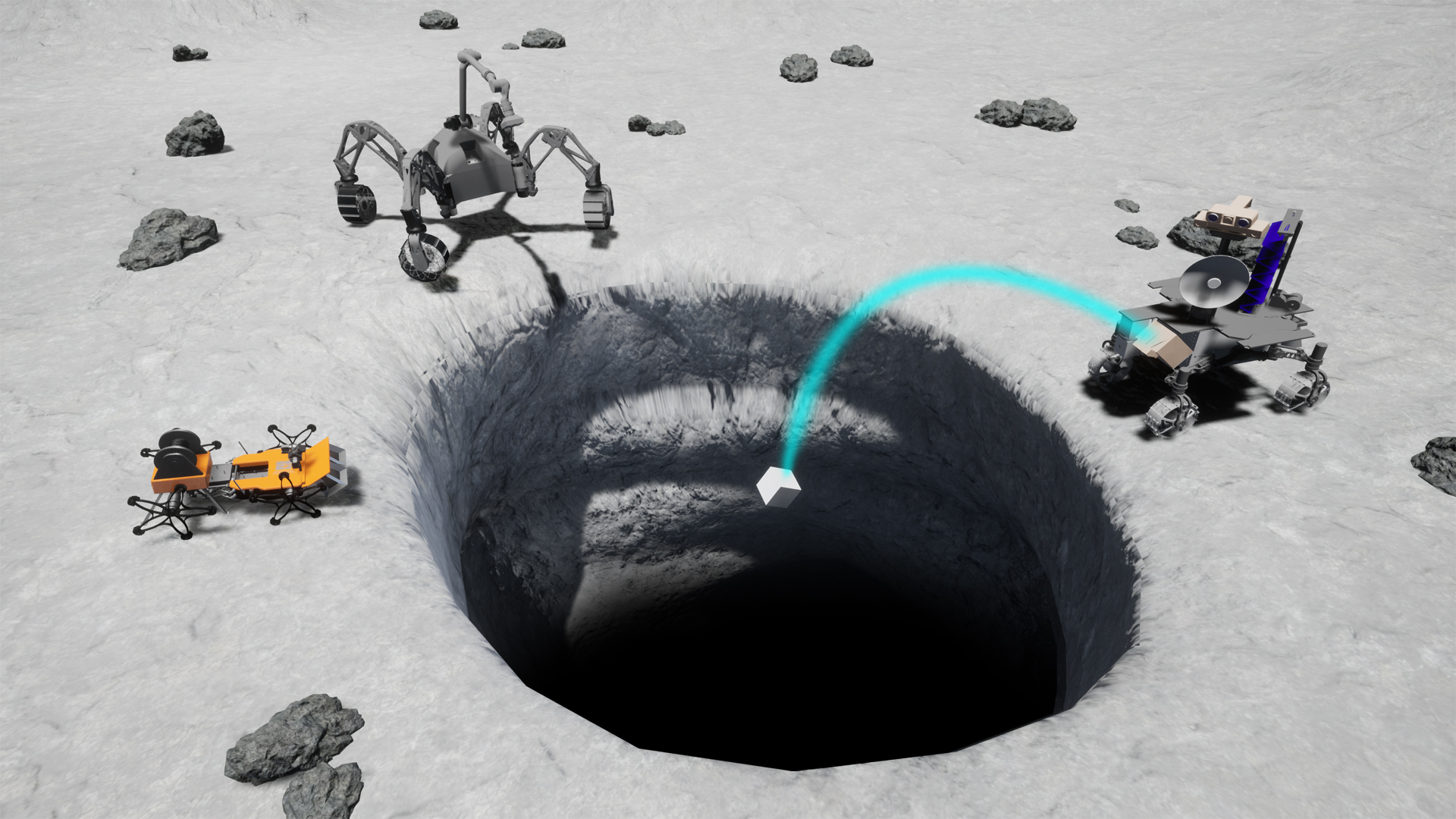
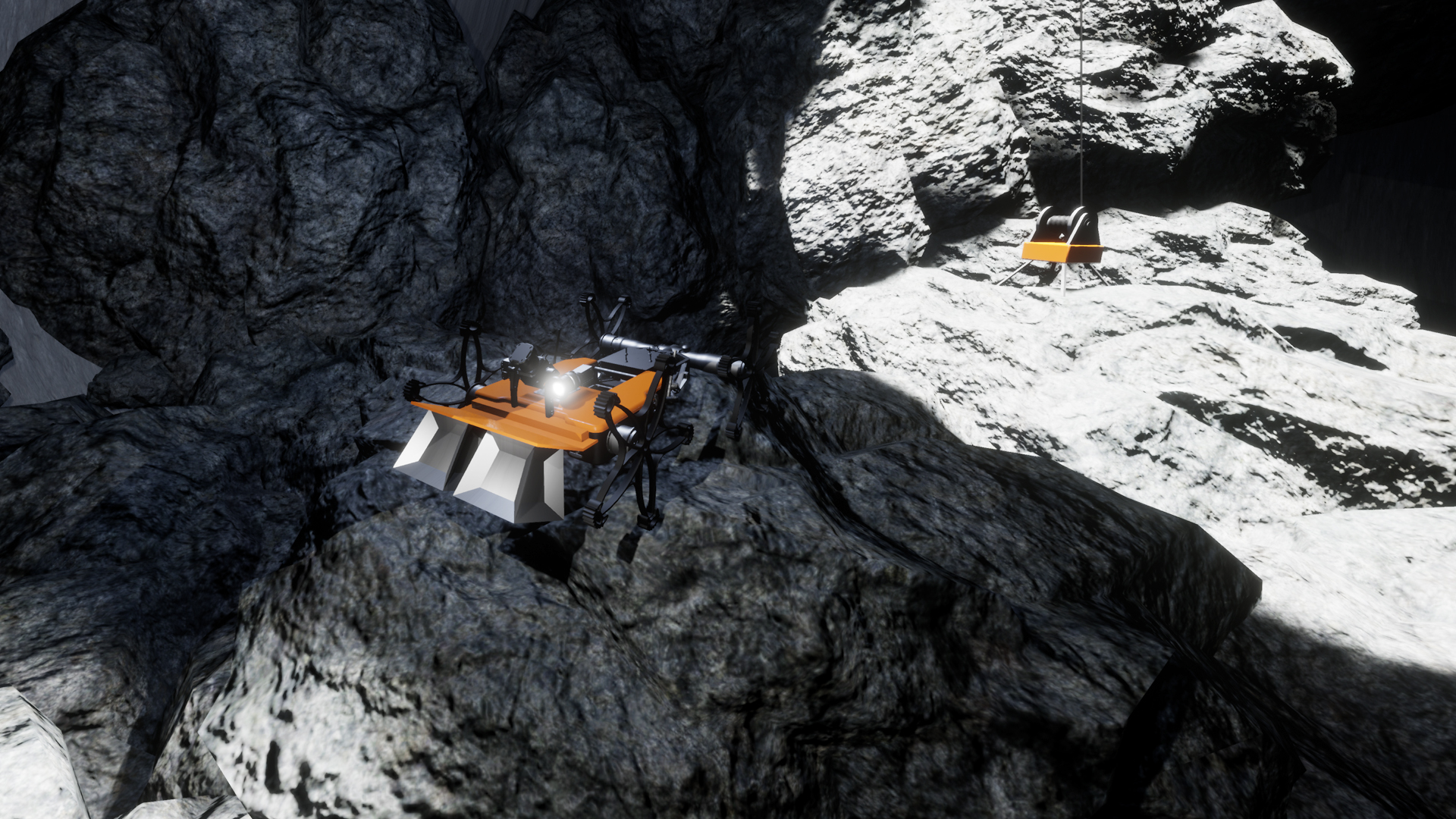
Lavahöhlen auf dem Mars und insbesondere auf dem Mond sind nicht nur für Exogeologen und andere Weltraumforscher interessant, sondern könnten auch als Lagerräume oder sogar als Lebensräume für künftige menschliche Siedlungen genutzt werden. Die Frage ist, wie diese riesigen Hohlräume unter der Mondoberfläche zugänglich gemacht und erforscht werden können, ohne das Leben der Astronauten zu riskieren.
Hier kommen Roboter, oder besser gesagt Roboterteams, ins Spiel. In Zukunft könnten mehrere kooperierende Roboter die Oberfläche über einer Lavaröhre erforschen und sogar die Höhle von innen betreten und erkunden. In CoRob-X haben wir in einer mondanalogen Mission auf Lanzarote demonstriert, wie das funktionieren könnte. Mit der gemeinsamen Anstrengung von Forschern aus fünf europäischen Mitgliedsstaaten und der Finanzierung durch das H2020-Programm der Europäischen Kommission hatten wir ein robotisches Explorationsteam aus drei autonomen Robotern entwickelt. Im Januar/Februar 2023 konnte das CoRob-X-Roboterteam alle vier Phasen einer Erkundungsmission in einer Lavaröhre auf dem Mond erfolgreich abschließen. Aber sehen Sie selbst...