PULSAR (OG8)
Prototype of an Ultra Large Structure Assembly Robot
")
PULSAR erforscht die autonome Montage großer Strukturen im Weltraum. Der Montageprozess erfolgt, ähnlich wie in der Industrie, durch den Einsatz robotischer Systeme, die modulare Bauteile zu einer Gesamtstruktur zusammenfügen. Allerdings bringt die Anwendung im Weltall außergewöhnliche Herausforderungen mit sich und erfordert Innovationen in vielen Bereichen. So zum Beispiel bei der Manipulation in Schwerelosigkeit mit freischwebender Basis sowie bei der hochpräzisen Interaktion unter Einfluss von Unsicherheiten und Störeinflüssen. Die notwendigen Technologien sollen in PULSAR bis zu einem Reifegrad (TRL) von 5-6 entwickelt werden.

Projektdetails
Die autonome Montage im Weltraum spielt eine kritische Rolle in zukünftigen Missionen, in denen Strukturen notwendig sind, die aufgrund ihrer Größe nicht in einem Stück im All ausgesetzt werden können. Das James Webb Weltraumteleskop mit einem Spiegel von 6,5 Meter Durchmesser hat dieses Limit erreicht. Zukünftige Teleskope mit deutlich größeren Spiegeln, wie das Konzept des High-Definition Space Telescope, erfordern somit neue Montagetechnologien auf Basis autonomer Roboter. Die Notwendigkeit großer Strukturen im Weltraum geht dabei weit über den Einsatz von Teleskopen hinaus und betrifft ebenso Photovoltaikanlagen zur Energiegewinnung, Hitzeschilde zur Landung auf dem Mars, sowie Sonnensegel, mit denen die äußeren Regionen unseres Sonnensystems erforscht werden können.
Das Hauptziel von PULSAR ist die Entwicklung und Demonstration solcher Technologien, die eine präzise Montage einer großen Struktur im Erd-Orbit durch ein autonomes robotisches System ermöglichen. Als Anwendungsszenario dient dabei die Montage eines Teleskopspiegels mit 8 Metern Durchmesser. In diesem Zusammenhang werden drei Demonstratoren gebaut, welche die verschiedenen Herausforderungen in diesem Unterfangen angehen:
- dPAMT: Demonstrator für hohe Präzision während der Montage
- dLSAFFE: Demonstrator für die Montage in Schwerelosigkeit (Unterwasser)
- dISAS: Physikalischer Simulator für die Montage im Erd-Orbit.
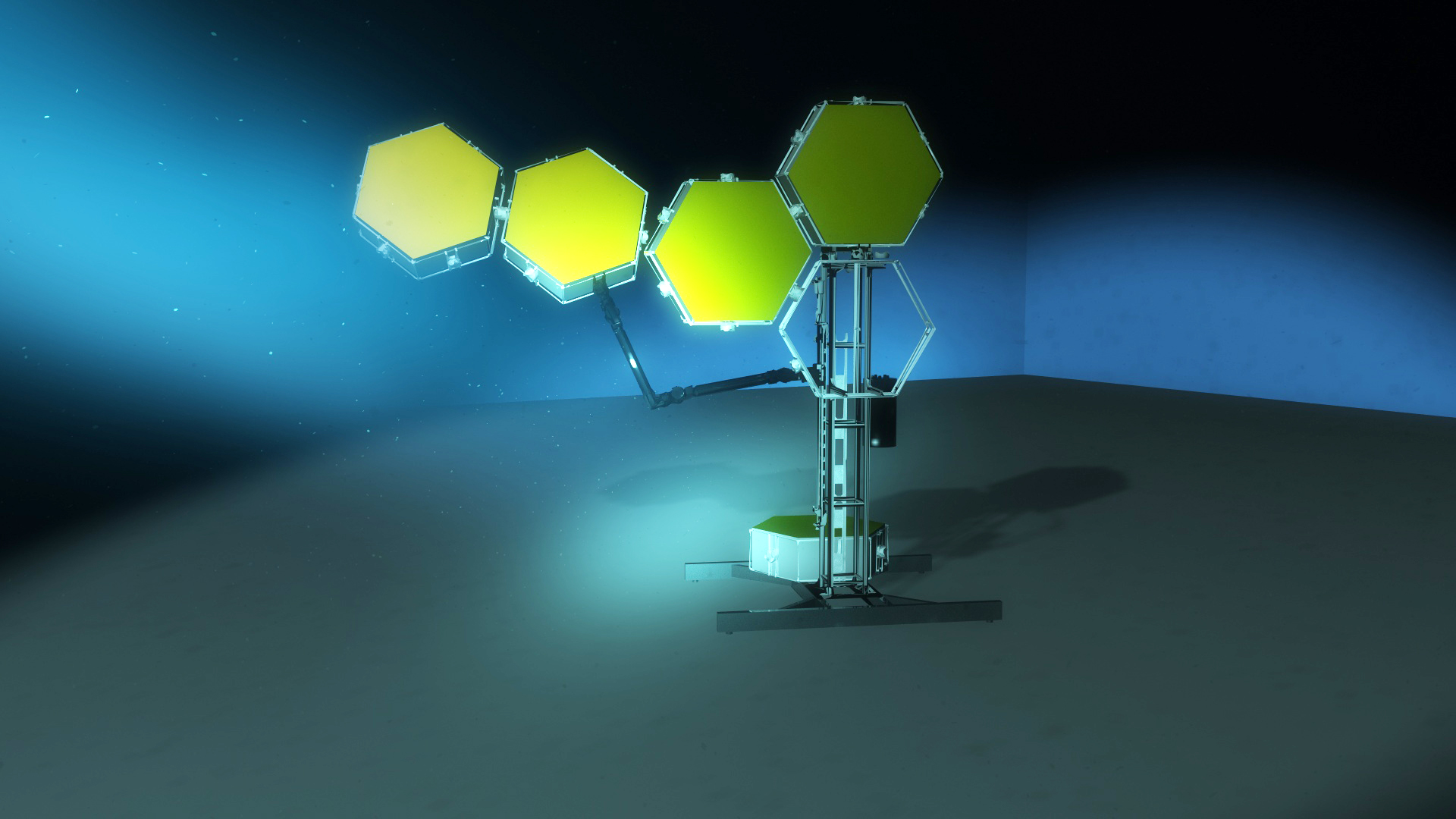
Das DFKI Robotics Innovation Center entwickelt den Demonstrator dLSAFFE (demonstrator of Large Structure Assembly in Free Floating Environment), mit dem die Montage einer großen Struktur in Schwerelosigkeit gezeigt werden soll. Hierzu wird die Demonstration unter Wasser in der Maritimen Explorationshalle in Bremen stattfinden. In Kooperation mit dem Partner Graal Tech wird ein unterwassertaugliches Mock-up des Satelliten mit Manipulator gebaut. Das System soll die autonome Montage eines Teils des Teleskopspiegels zeigen. Das Mock-up, der Manipulator und die Spiegelmodule werden dabei im Maßstab 1:1 repräsentiert: Die Module haben einen Durchmesser von 150 cm, der Manipulator hat eine Reichweite von lediglich 2 m. Um trotz der begrenzten Reichweite einen Spiegel mit 8 m Durchmesser zu bauen werden innovative Konzepte entwickelt und in dLSAFFE getestet: Der Manipulator kann einen Teil des Spiegels verschieben und somit den Arbeitsraum wählen. Damit ist es möglich, Module an Stellen zu montieren, die ansonsten außerhalb der Reichweite des Manipulators wären.
Der Großteil der Software, z.B. zur Robotersteuerung, wird im ESROCOS Betriebssystem implementiert. ESROCOS, ein Roboter Framework speziell für die Weltraumrobotik, entstand aus dem gleichnamigen EU Projekt und basiert auf dem von der ESA entwickelten TASTE Framework. DLSAFFE demonstriert somit auch die Einsatzfähigkeit von ESROCOS.
Die Möglichkeit große Strukturen im Weltall zu montieren ist von entscheidender Bedeutung für zukünftige Weltraummissionen, sowohl im kommerziellen als auch im wissenschaftlichen Bereich. Die Entwicklungen in PULSAR sind aber auch für andere Anwendunsgfelder von großer Relevanz, insbesondere für die Unterwasserrobotik und Industrie 4.0. Mit der Bereitstellung standardisierter Schnittstellen und Komponenten in großen Systemen ergeben sich innovative Einsatzmöglichkeiten für autonome Montagetechnologien.
PULSAR ist ein Projekt im Rahmen des EU-Förderprogramms “Horizon 2020”. Das Vorhaben ist aus dem “Space Robotics Technologies”-Aufruf hervorgegangen und läuft unter “Operational Grand 8” (OG8). Die in PULSAR entwickelten Demonstratoren benutzen Bausteine, die in Projekten des vorangegangen Aufrufs entwickelt wurden, insbesondere ESROCOS (OG1), InFuse (OG3) und SIROM (OG5).
Videos
PULSAR - Prototype of an Ultra Large Structure Assembly Robot

PULSAR: Unterwasser-Demonstration von Weltraum-Robotik im großen Maßstab

Die Weltraumrobotik ist eine Schlüsseltechnologie für die Erforschung des Weltraums und ein entscheidender Faktor für künftige wissenschaftliche und kommerzielle Missionen. Unterwassertests sind ein wertvolles Instrument zur Validierung von Robotertechnologien für den Weltraum. Im Testbecken des DFKI können selbst große Roboter in simulierter Schwerelosigkeit mit weitgehend uneingeschränktem Bewegungsspielraum getestet werden.
Im Projekt PULSAR haben das DFKI und europäische Partner eine Technologie für die autonome Montage von Weltraumteleskopen der nächsten Generation im Orbit entwickelt. Drei Roboterdemonstratoren wurden entwickelt, um die Technologie zu validieren. In diesem Video wird einer dieser Demonstratoren im Detail vorgestellt: der Unterwasser-Demonstrator von Large Structure Assembly in Free-Floating Environment - dLSAFFE.