ASGUARD III
Advanced Security Guard V3

Ansprechpartner/in:
Technische Details
Systembeschreibung

Asguard III ist ein mobiles Robotersystem mit 4 angetriebenen Sternrädern und einem passiven Körperfreiheitsgrad. Die Radgeometrie ermöglicht es dem Roboter sich in unebenem Gelände zu bewegen und Treppen zu steigen. Dieser Roboter basiert auf der Asguard II Plattform und wurde mit einer Vielzahl zusätzlicher Sensoren und einem sehr leistungsfähigen Steuerrechner ausgestattet. Der Sensorkopf mit Laserscanner, Stereo-Camera-System und Inertialmesssystem erlaubt es dem Roboter seine Umgebung zu erfassen und autonom durch unbekanntes Gelände zu navigieren.


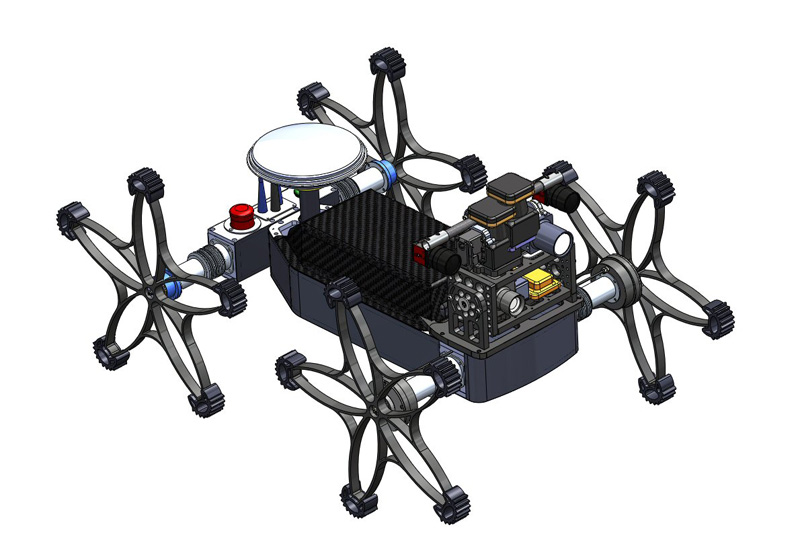
Fotos
Fotos: DFKI GmbH