Coyote III

Technical Details


System description



Coyote III is developed within the scope of the project TransTerrA which aims to implement a logistics chain, based on a heterogeneous team of mobile and stationary robotic devices. While Coyote III is designed to be used as a modular rover platform, it is envisaged to operate as shuttle rover the logistics chain. The shuttles main task is to realize the transport of payload items between the exploration rover and different stationary modules.
Coyote III represents an enhanced design of the Coyote II rover, which was successfully tested and operated as micro scout rover. The design considerations and development concept of Coyote III is directly derived from the lessons learned of Coyote II as well as the given reference mission scenario. A modular design concept based on lightweight construction was chosen for Coyote III allowing to implement additional payload elements. Following the modularity concept introduced by the logistics chain, Coyote III will be equipped with two standardized electro-mechanical interfaces. They allow to dock additional payload items to the rover and provide the potential of extending the functionality of the rover platform. For payload item handling, a modular manipulator has been developed, which can be cocked to Coyote III via its electro-mechanical interfaces.
Besides the primar scenario with respect to extraterrestrial exploration, Coyote III can be applied to terrestrial applications as well, such as search and rescue and /or security. Especially the compact design and high mobility of Coyote III provide benefits within these fields. Furthermore, the modular design as well as the docking interfaces allow to adapt and/or equip the rover with dedicated payloads for each mission.
Videos
CoRob-X: DFKI tests lava cave exploration by autonomous robot teams for future lunar missions
Lava caves on Mars and particularly on the moon are not only interesting for exo-geologists and other space scientists, but they also could be used as storage rooms or even habitats for future human settlements. The question is how to access and explore these huge cavities under the lunar surface without risking the lives of astronauts.
This is where robots, or rather teams of robots, come into play. In the future, several cooperating robots could explore the surface above a lava tube and even enter and explore the cave from the inside. In CoRob-X, we demonstrated in a Lunar Analogue Mission on Lanzarote how this could work. With the joint effort of researchers from five European member states and funding from the European Commissions’ H2020 Programme, we had developed a robotic exploration team of three autonomous robots. In January/February 2023, the CoRob-X robot team was able to successfully complete all four phases of a lunar lava tube exploration mission. But see for yourselves…
Coyote III: Demonstrates Robotic Search and Rescue Scenario
Coyote III - initially build for space exploration tasks, it has shown its multi purpose character in many different scenarios. The rover captivates with high mobility and flexibility, to cope all kinds of situations.
Other than space, Coyote III can also be deployed for search and rescue (SAR) tasks on Earth. Using the camera and laser scanner, the operator gets a clear overview of the surrounding and can safely operate the rover. With a modular system architecture, various sensor and payload modules can be attached to the rover. This allows to help the rescue teams in all kinds of situations and increase the safety of their work. Coyote 3 provides even the possibility to operate fully autonomous and explore extensive areas.
In addition to mapping and visual awareness, the detection and mapping of hazardous materials is an important part of SAR applications. To demonstrate this capabilities, a representative environmental sensor unit was designed and integrated into a modular payload item. The sensor module is equipped with different gas sensors as well as temperature and humidity sensors.
The environment sensor package can detect gas contamination, and help to find gas leaks. This can warn the rescue forces about dangerous areas, for example with high sludge or carbonic oxide gas pollution. During its traverse, the rover automatically generates a surrounding map and highlights the detected gas concentration.
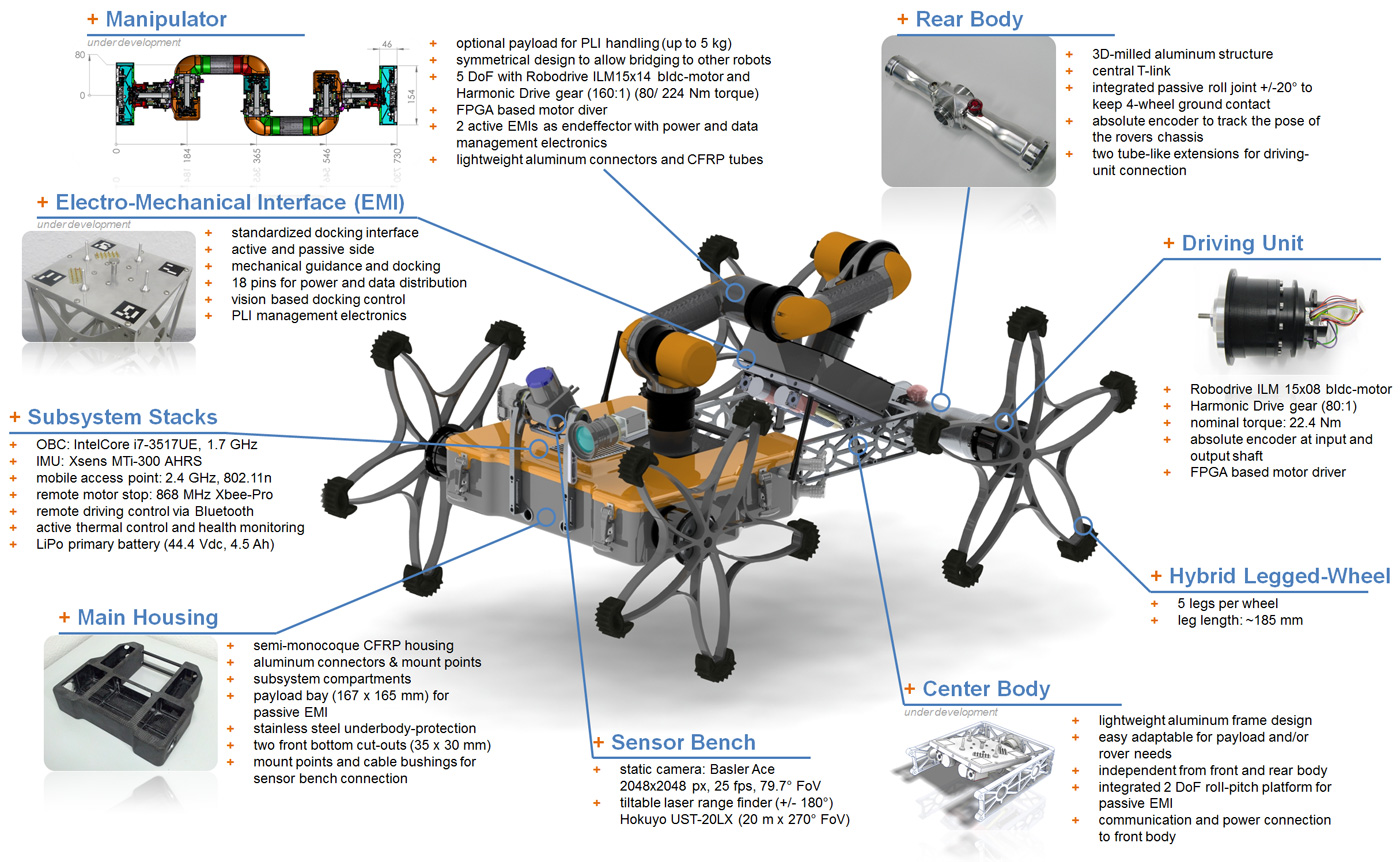
Coyote III: Assembly of Subsystems
The video presents the assembly of Coyote III featuring its dedicated subsystems and their core properties. Coyote III is a micro rover with high mobility performance in unstructured terrains. Equipped with its own power source, on-board sensor suite and on-board computer it is able to perform exploration tasks autonomously. Moreover, the communication subsystem enables the rover to cooperate with other systems. Coyote III is equipped with two standardized electro-mechanical interfaces, allowing to dock additional payload elements, such as standardized payload items or a manipulator. Due to the lightweight and robust structural design of Coyote III, it is possible to apply several kilograms of additional payload to the rover. The modular design approach allows to adapt the rover structure according to specific payload requirements.
Field Trials Utah: Robot team simulates Mars mission in Utah
A barren, rocky desert landscape and not a single soul around – to come as close as possible to the inhospitable conditions on the Red Planet, scientists of the Robotics Innovation Center of the German Research Center for Artificial Intelligence (DFKI) tested the cooperation of various robot systems in the desert of the American state of Utah from 24 October to 18 November 2016.
TransTerrA: Coyote III Crater Trials
Coyote III masters an artificial lunar crater wall with 45° inclination.
TransTerrA: The robot Coyote III in the snow
Watch Coyote III driving through deep snow within rough terrain
Coyote III: Initial manual outdoor run
Coyote III’s initial manual run with round wheels in DFKI’s outdoor sand field.