SEARCH
Surface Exploration Android Remotely Controlled by Humans

The overall project consists of the development of a functional demonstrator of a miniature exploration rover designed for a lunar mission. The rover should be able to cross over efficiently rough surfaces by using a robust lightweight construction. The mechanical design of the rover was developed by Walter Kern GmbH and delivered to the DFKI Bremen for integration. At the DFKI Bremen, necessary electrical components for the rover were selected and in addition, a smart power management system, consisting of hardware and software components, was developed. By reducing the complexity, the aim of the project is also to reduce the system costs to a level that a loss within the scope of a mission is tolerable. To this aim, various storage technologies for the system were investigated at the DFKI.
| Duration: | 01.08.2020 till 31.01.2022 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: |
Federal Ministry for Economic Affairs and Climate Action
German Aerospace Center e.V. |
| Grant number: | 50RA2041 |
| Partner: |
Walter Kern GmbH, Füssen |
| Application Field: |
SAR- & Security Robotics
Space Robotics |
| Related Projects: |
TransTerrA
Semi-autonomous cooperative exploration of planetary surfaces including the installation of a logistic chain as well as consideration of the terrestrial applicability of individual aspects
(05.2013-
12.2017)
SAMLER-KI
Semi-autonomous micro rover for lunar exploration using artificial intelligence
(11.2022-
10.2025)
|
| Related Robots: |
MoVe
Moon Vehicle
|


Project details

The overall project consists of the development of a functional technology demonstrator of a miniature exploration rover designed for a lunar mission. The rover should be able to cross over efficiently rough surfaces by using a robust lightweight construction. The mechanical design of the rover was developed by Walter Kern GmbH and delivered to the DFKI Bremen for integration.
At the DFKI Bremen, necessary electrical components for the rover were selected and in addition, a smart power management system, consisting of hardware and software components, was developed. By reducing the complexity, the aim of the project is also to reduce the system costs to a level that a loss within the scope of a mission is tolerable. To this aim, various storage technologies for the system were investigated at the DFKI.
To achieve these goals, various system design concepts of different rovers were analysed. All designs are strongly dependent on the targeted latitude for the landing sides on the moon (Fig. 1). For the most realistic and generic design possible, while taking into account a passive thermal control system (Fig. 2), the solar cells on the rover were arranged in a pyramid shape. The power budget of the system design (Fig. 3) was adapted accordingly. Figure 4 shows the final CAD model of the finished rover MoVe (Moon Vehicle).
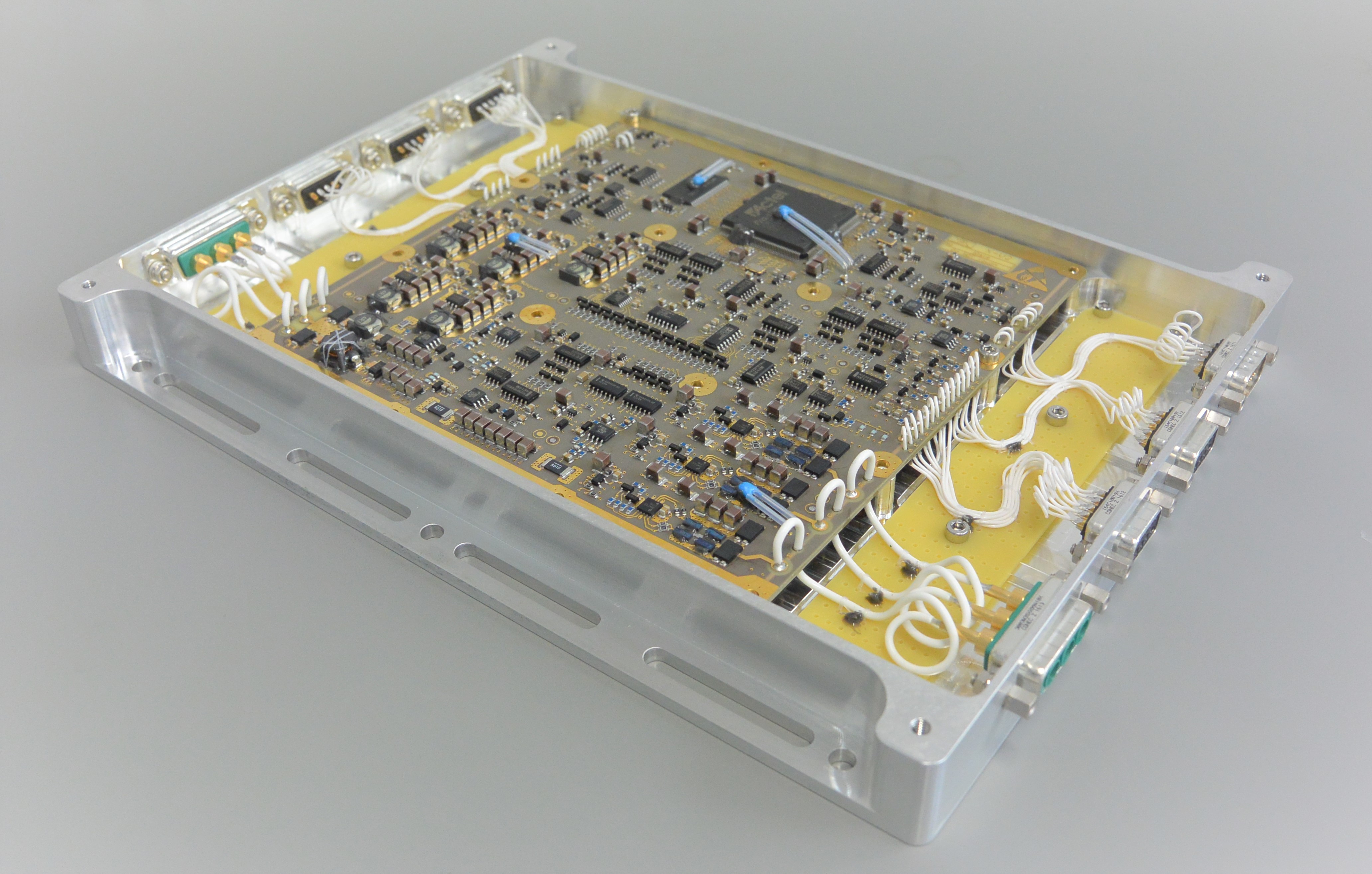
The focus at DFKI was on the development of the rover's Electrical Power System (EPS). For this purpose, a modular architecture was designed that enables the exchange of individual technologies for the energy storage and solar controllers. COTS components were used for the modules, which proved to be a challenge due to the global chip crisis. Figure 5 shows the block diagram of the rover. Modules for the OBC, VCU, motor controller and payload, COM were obtained as off-the-shelf components with space equivalent mass and power characteristics. Figure 6 shows the set of electrical components developed for the system. These can be easily integrated via a backplane and a plug-in system (Fig. 7) without additional cabling.
Thus, the MoVe rover (Fig. 8) serves as a system for testing various configurations and technologies of the EPS for future exploration in space. In the SEARCH project, the use of supercapacitors, which are less temperature-dependent than chemical storage devices, was investigated. This technology can be used in the future to develop systems with lower complexity and high robustness. Video 1 shows the system in a simplified test bed for simulating solar illumination and reduced gravity under lunar-like conditions.
Videos
SEARCH - Manufacturing Test for PCB Mounted Solar Cell Assemblies
SEARCH: MoVe in Testbed

Testen des Rovers unter mondähnlichen Bedingungen mit simuliertem Sonnenlicht und reduzierter Schwerkraft Testing the rover under simulated sunlight and low gravity