MoVe
Moon Vehicle

Technical Details
| Size: | 0,47 m x 0,45m x 0,65 m |
| Weight: | ca. 5,9 kg |
| Power supply: |
Configurable Electrical power System (EPS), Solar, 3x LSH20 Li-SOCl2 cells, 3x 18650 LiFePo cells, 25x ECAP STSC Super CAPs
|
| Speed: | 0,1 m/s |
| Actuation/ Engine: |
4x Brushed DC motors, Maxon, with planetary gears
|
| Sensors: |
1x Nearfield Camera
|
| Communication: |
Extern:
• Rover Command Interface (433 Mhz)
• EPS Telemetry Interface (NDLCOM) (433 Mhz)
• Payload Data Interface (2,4 gHz) – Video stream
Intern:
• CAN (UAVCAN)
• LVDS
• discrete signals
|
Organisational Details |
|
| Partner: |
Walter Kern GmbH, Füssen |
| Sponsor: |
Federal Ministry for Economic Affairs and Climate Action
German Aerospace Center e.V. |
| Grant number: | 50RA2041 |
| Application Field: | Space Robotics |
| Related Robots: |
Coyote III
Advanced Security Guard V4
|


System description


With a mass of about 5 kg, the MoVe rover is made for exploring the lunar surface. The system is the result of the SERACH project, completed in January 2022, and the cooperation with the Walter Kern GmbH. In the project researcher at DFKI focused on the development of the Electrical Power System (EPS), used to power the rover by sun light. Therefore, it could be said, that the rover is made as a mobile testbed for the electronics inside, as for driving itself. The rover was used to investigate fundamental relationships for the system design due to the nature of the autarky power supply and its influences on other subsystems. These includes to answer questions such as: How fast can the rover still drive without drawing power from its batteries? Can we build a rover that doesn't need batteries? How can we place the solar cells in order to have holistic energy during the lunar day and how could a thermal control system for the rover could like?
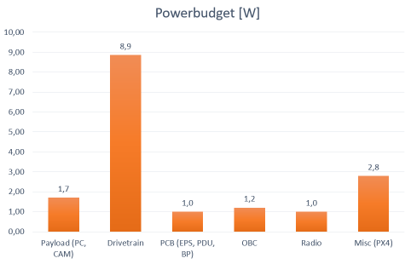
For the most realistic and generic design possible, while taking into account a passive thermal control system (Fig. 1), the solar cells on the rover were arranged in a pyramid shape. The power budget of the system design (Fig. 2) was adapted accordingly. Figure 3 shows the final CAD model of the finished rover MoVe (Moon Vehicle).
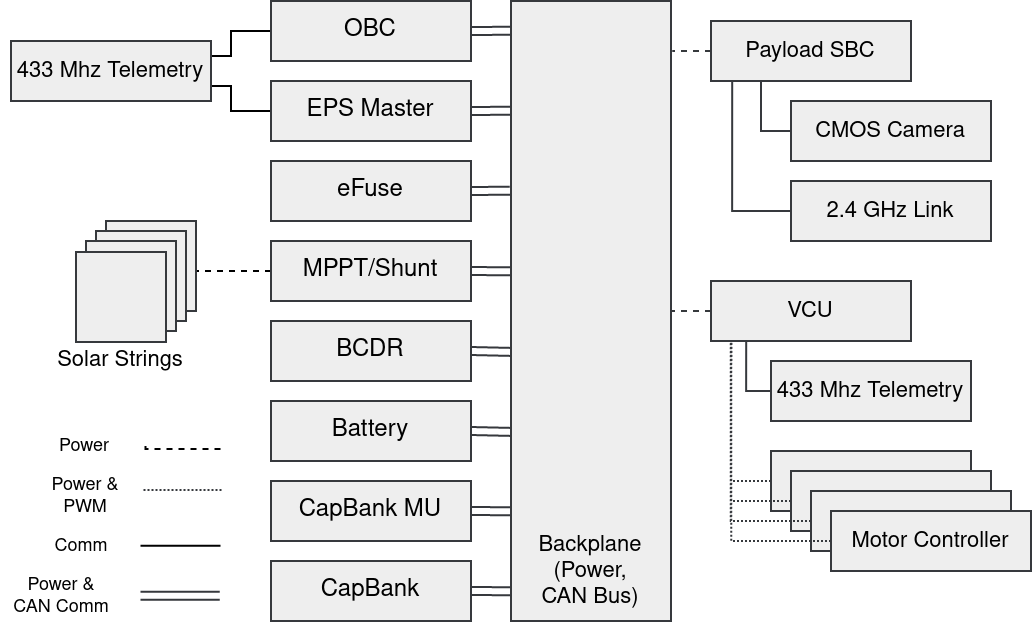
The focus at DFKI was on the development of the rover's Electrical Power System (EPS). For this purpose, a modular architecture was designed that enables the exchange of individual technologies for the energy storage and solar controllers. COTS components were used for the modules, which proved to be a challenge due to the global chip crisis. Figure 4 shows the block diagram of the rover. Modules for the OBC, VCU, motor controller and payload, COM were obtained as off-the-shelf components with space equivalent mass and power characteristics. The images below show the electrical components developed for the system. These can be easily integrated via a backplane and a plug-in system without additional cabling and are be integrated in an electronic box made from aluminum.
Thus, the MoVe rover serves as a system for testing various configurations and technologies of the EPS for future exploration in space. In the SEARCH project, the use of supercapacitors, which are less temperature-dependent than chemical storage devices, was investigated. This technology can be used in the future to develop systems with lower complexity and high robustness. The video shows the system in a simplified test bed for simulating solar illumination and reduced gravity under lunar-like conditions.
Videos
SEARCH: MoVe in Testbed

Testen des Rovers unter mondähnlichen Bedingungen mit simuliertem Sonnenlicht und reduzierter Schwerkraft Testing the rover under simulated sunlight and low gravity
More Images



