MoVe
Moon Vehicle
 Foto: Niklas Mulsow, DFKI
Foto: Niklas Mulsow, DFKI
Technische Details


Systembeschreibung
 Foto: Niklas Mulsow, DFKI
Foto: Niklas Mulsow, DFKI
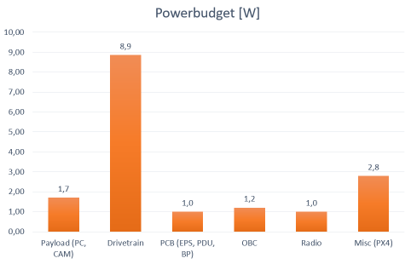 Foto: Niklas Mulsow, DFKI
Foto: Niklas Mulsow, DFKI
 Foto: Niklas Mulsow, DFKI
Foto: Niklas Mulsow, DFKI
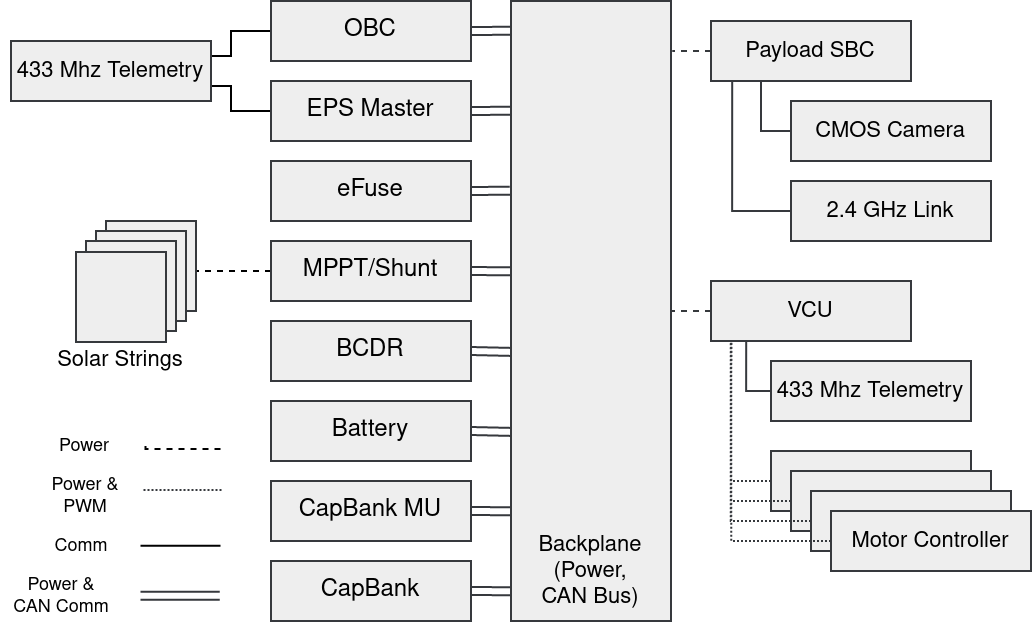 Foto: Benjamin Hülsen, DFKI
Foto: Benjamin Hülsen, DFKI
Mit einer Masse von etwa 5 kg ist der Rover MoVe für die Erkundung der Mondoberfläche gemacht. Das System ist Ergebnis des Projektes SEARCH und der Zusammenarbeit mit der Walter Kern GmbH. In dem im Januar 2022 abgeschlossenen Projekt wurde am DFKI vor allem an der Entwicklung des im Rover verwendeten Electrical Power Systems (EPS) geforscht. Bei dem Rover handelt es sich um einen fahrbaren Teststand für die Elektronik im Inneren. Dabei dient der Rover dazu, grundlegende Zusammenhänge für das Systemdesign aufgrund der Beschaffenheit der autarken Stromversorgung und dessen Einflüsse auf andere Subsysteme zu untersuchen. Dazu zählen Fragen wie: Wie schnell kann der Rover noch fahren, ohne dabei Strom aus seinen Batterien zu entnehmen? Können wir einen Rover bauen der auch ohne Batterien auskommt? Wie können wir die Solarzellen platzieren, um während des Mondtages ganzheitlich Energie zu haben und wie könnte dann ein Thermal Control System aussehen?
Für einen möglichst realistische und generische Auslegung unter Berücksichtigung eines passiven Thermal Control Systems (Abb. 1) wurde die Anordnung der Solarzellen auf dem Rover pyramidenförmig gewählt und das Powerbudget des Systemdesgins (Abb. 2) dahingehend angepasst. Abbildung 3 zeigt des CAD-Modell des fertigen Rovers MoVe (Moon Vehicle).
Der Hauptfokus am DFKI lag bei der Entwicklung auf dem Electrical Power Systems (EPS) des Rovers. Hierfür wurde eine modulare Architektur entworfen, die es ermöglicht einzelnen Technologien für die Energiespeicher und Solarregler auszutauschen. Für die Module wurde auf COTS-Komponenten zurückgegriffen, was sich aufgrund der Chipkrise als Herausforderung darstellte. Abbildung 4 zeigt das Blockschaltbild des Rovers. Module für das OBC, VCU, Motor Controller und Payload, COM wurden als fertige Komponenten mit Weltraum äquivalenten Massen- und Leistungseigenschaften bezogen. Die weiteren Fotos unten zeigen die entwickelten elektrischen Komponenten für das System, welche über eine Backplane und eine Einschubsystem einfach und ohne zusätzliche Verkabelung integriert werden können. Diese werden in der e-Box, einem Gehäuse aus Aluminium zusammengefasst.
Der Rover MoVe dient somit als System der Erprobung verschiedener Konfigurationen und Technologien des EPS für die zukünftige Exploration im Weltraum. Im Projekt SEARCH wurde vor allem die Verwendung von Superkondensatoren, welche im Vergleich zu chemischen Speichern wenig temperaturabhängig sind, untersucht. Diese Technologie kann in Zukunft dazu dienen Systeme mit geringerer Komplexität und hoher Robustheit zu entwickeln. Das Video zeigt das System in einem vereinfachten Teststand zur Simulation der Sonneneinstrahlung und reduzierter Schwerkraft unter mondähnlichen Bedingungen.
Videos
SEARCH: MoVe im Testbett

Testen des Rovers unter mondähnlichen Bedingungen mit simuliertem Sonnenlicht und reduzierter Schwerkraft
Weitere Bilder



