EurEx-LUNa
EurEx - Persistent under-ice navigation


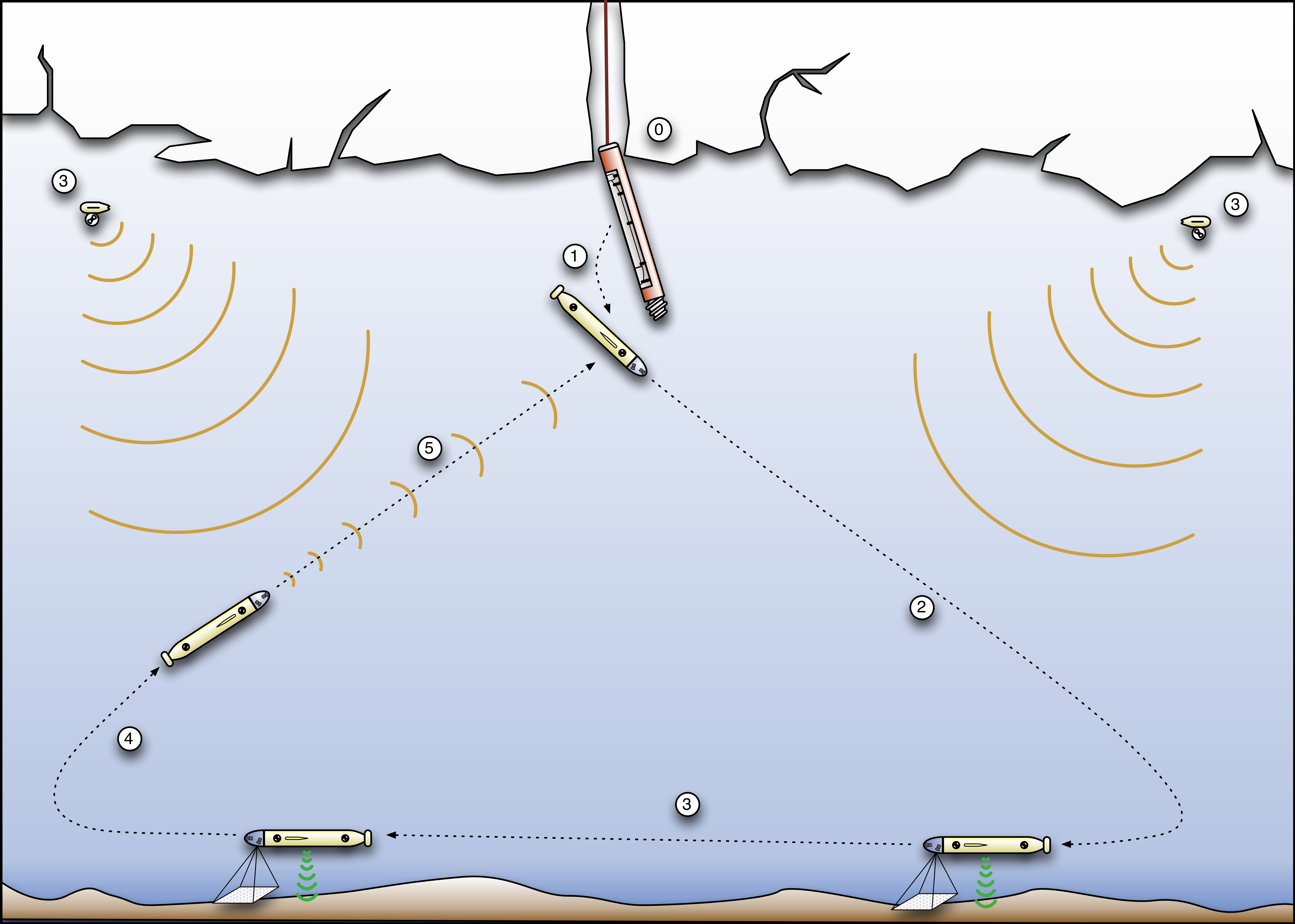
One important aspect of future missions to ice-covered moons within our solar system is the exploration of the oceans underneath the ice. Based on the exploration concept developed in the Europa-Explorer project, the aim of the EurEx-LUNa project is to further evolve the under-ice navigation and exploration capabilities of an autonomous system and subsequently evaluate them in an analog mission. In order to allow for persistent exploration in challenging and difficult to access environments, both the software and the hardware of an autonomous underwater vehicle must be thoroughly tested and continuously improved. An essential part is the safe return of the underwater vehicle and to successfully attach to the docking interface, allowing data and energy exchange. To evaluate the capabilities and robustness of the overall system an analog mission will be carried out in an ice-covered lake.
| Duration: | 01.03.2020 till 30.09.2023 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: |
Federal Ministry for Economic Affairs and Climate Action
German Aerospace Center e.V. |
| Grant number: | The EurEx-LUNa project is funded by the German Ministry for Economic Affairs and Climate Action (BMWi) (Grant No. 50 NA 2002). |
| Website: | https://www.dfki.de/web/forschung/eurex-abisko |
| Application Field: |
Underwater Robotics
Space Robotics |
| Related Projects: |
EurEx
Europa-Explorer
(12.2012-
04.2016)
EurEx-SiLaNa
EurEx-Safe Long-Term Navigation
(09.2017-
10.2019)
CUSLAM
Localization and mapping in confined underwater environments
(09.2009-
07.2012)
|
| Related Robots: |
BlueROV2
Documentation vehicle
DAGON
Exploration AUV for long-distance-missions
Teredo IceShuttle
Through-Ice-Cap Transfer-Vehicle & Base Station
|


Project details




Videos
EurEx-LUNa: Under Ice Navigation of AUV DeepLeng
In this short video we explain under ice navigation of the AUV Deep Leng.
EurEx-LUNa: Preparing a Mission to Jupiter's moon Europa. Under-Ice field test with the AUV DeepLeng
At the end of the third phase of the Europa Explorer project for long-range underwater navigation (EurEx-LUNa), DFKI researchers are now conducting the final field tests in the Abisko National Park in northern Sweden. There, they are testing the DeepLeng autonomous underwater vehicle in frozen Lake Torneträsk to prove the feasibility of the concept for autonomous under-ice navigation.