Durchschnittlich 600 Millionen Kilometer trennen die Erde vom Eismond Europa, einem der vier großen Jupitermonde. Unter seiner mächtigen Wassereishülle soll sich ein etwa 100 km tiefer Ozean befinden, an dessen Grund hydrothermale Quellen heißes und mineralienreiches Wasser an ihre Umgebung abgeben und so die Grundlage für lebende Organismen schaffen könnten. Wie sich dieser für die Wissenschaft höchst interessante Ort erforschen ließe, hat das Robotics Innovation Center als Teil der Explorer-Initiativen des Deutschen Zentrums für Luft- und Raumfahrt (DLR) untersucht. Dafür entwickelten die Forschenden in drei aufeinander aufbauenden Projektabschnitten autonome Unterwasserfahrzeuge (AUVs), die unter einer Eisdecke eigenständig navigieren und forschen können.
Im dritten Abschnitt des Projekts Europa Explorer zur Langstrecken-Untereis-Navigation (EurEx-LUNa) stehen nun die abschließenden Feldtests bevor, bei denen das AUV DeepLeng erstmals außerhalb des Labors unter realitätsnahen Bedingungen getestet werden soll: Dafür reisen fünf DFKI-Wissenschaftler vom 20. März bis zum 2. April 2022 in das kleine, nordschwedische Örtchen Abisko im gleichnamigen Nationalpark an den Torneträsk-See. Hier, nördlich des Polarkreises bei erwarteten Außentemperaturen von etwa Minus 10 Grad, soll der Unterwasserroboter den bis zu 168 Meter tiefen zugefrorenen See eigenständig erkunden. Für die Forschenden, die für den Zeitraum der Feldtests in einer Forschungsstation in Abisko untergebracht sind, ist es trotz eisiger Kälte eine Feuertaufe, um die Machbarkeit des Konzepts zur autonomen Navigation unter Eis zu beweisen. Einmal mit dem mobilen Kran zu Wasser gelassen, gewährt das Loch im Eis nur noch einen kurzen Blick auf das drei Meter lange, in auffälligem gelb gehüllte System, bevor es hinabtaucht und vollständig unter der Eisdecke verschwindet. Hier muss sich der Roboter bei trüber Sicht komplett allein zurechtfinden, möglichst viele Informationen von seiner Umgebung sammeln und anschließend zurück zur Dockingstation navigieren, an der er die erhobenen Daten übermitteln und seine Batterien wieder aufladen kann.
Für das Gelingen dieser anspruchsvollen Mission entwickelten die Forschenden im Projekt EurEx-LUNa sowohl die Hardware als auch die Software des AUVs weiter. Unter anderem statteten sie DeepLeng mit einem USBL-Unterwassernavigationssystem aus, das akustische Signale senden, empfangen und verarbeiten kann. Zudem trainierten sie das System mithilfe maschineller Lernverfahren darauf, seinen Weg auch unter widrigsten Bedingungen zu finden und sicher an der Dockingschnittstelle anzudocken. Nun sollen sich die Vorarbeiten in dem Projekt sowie in der gesamten Europa Explorer-Projektreihe bei den Feldtests in Schweden bezahlt machen.
Als Fortführung der Projekte Europa Explorer und EurEx-SiLaNa wird EurEx-LUNa seit dem 1. März 2020 bis zum 31. Mai 2022 vom Bundesministerium für Wirtschaft und Klimaschutz (BMWK) über das Deutsche Zentrum für Luft- und Raumfahrt e.V. (DLR) gefördert.
Hinweis: Für alle, die sich ein Bild von den Feldtests in Schweden machen wollen, ist eine Live-Cam vor Ort installiert. Die Bilder werden via YouTube übertragen: https://youtu.be/u0DHAqp6v8s Zudem berichtet Projektleiter Dr. Marc Hildebrandt in einem Feldtestblog täglich von den Geschehnissen am Vortag: https://www.dfki.de/web/forschung/eurex-absiko
Weitere Informationen:
Projekt EurEx-LUNa: https://robotik.dfki-bremen.de/de/forschung/projekte/eurex-luna/
System DeepLeng: https://robotik.dfki-bremen.de/de/forschung/robotersysteme/deepleng/
Kontakt:
Dr.-Ing. Marc Hildebrandt
Telefon: +49 421 17845 4127
E-Mail: Marc.Hildebrandt[at]dfki.de
Aktuelles
Auf eisiger Mission: DFKI-Forschende testen extraterrestrische Untereis-Navigation in nordschwedischem Nationalpark

Die Vorgängerversion von DeepLeng taucht autonom im vereisten Stadtwaldsee in Bremen (Foto: DFKI, Annemarie Popp)

Animation des autonomen Dockings unter Eis (Animation: Meltem Fischer)
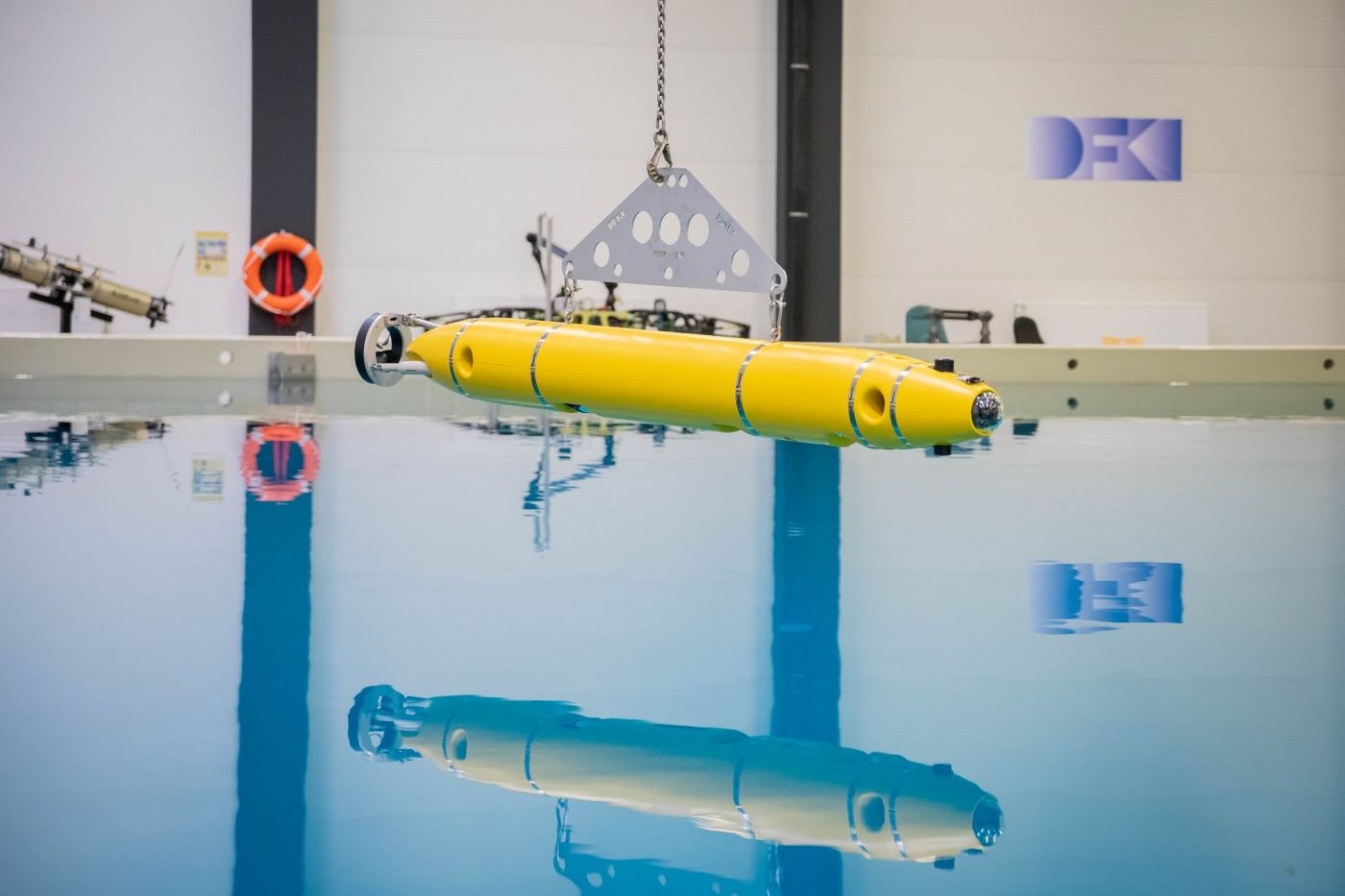
DeepLeng in der Maritimen Explorationshalle des DFKI in Bremen (Foto: DFKI, Annemarie Popp)