ARTEMIS
DLR SpaceBot Cup 2013 Rover

Technische Details

Systembeschreibung

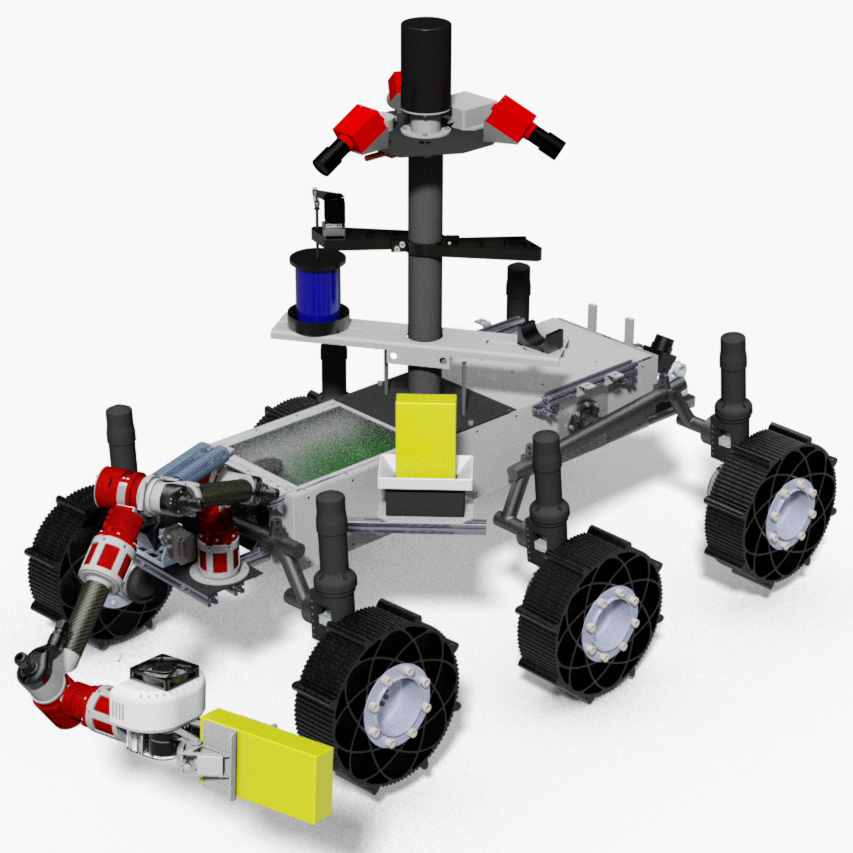
Der ARTEMIS Rover wurde 2013 innerhalb von acht Monaten für den nationalen Robotik-Wettbewerb DLR SpaceBot Cup von Studenten der Universität Bremen und DFKI-Wissenschaftlern entwickelt und gebaut. Das System sollte in einem schwierigen und zunächst unbekannten Gelände teilautonom Objekte auffinden, identifizieren, transportieren und sie schließlich zu einem Gesamtsystem integrieren.
Entsprechend der Wettbewerbs-Anforderungen ist der Roboter mit leistungsfähigen Sensoren und einem Manipulatorarm ausgestattet. Durch die Verwendung eines Dreifach-Fahrwerks und speziell angefertigten Gummi-Tweels wird eine ausgezeichnete Mobilität erreicht.
Videos
ARTEMIS: Erster Testlauf mit einem Penetrometer

Der am DFKI Robotics Innovation Center entwickelte Rover Artemis wurde mit einem Penetrometer ausgerüstet, das den Eindringwiderstand des Bodens misst, um präzise Informationen über die Bodenfestigkeit zu gewinnen. Solche Messungen ermöglichen Schlussfolgerungen über den aktuellen Bodenzustand, sowohl für landwirtschaftliche Anwendungen als auch in der Weltraumexploration. Das Video zeigt einen ersten Testlauf mit dem auf dem Roboter montierten Gerät. Während dieses Tests wurde der Roboter ferngesteuert und die maximale Eindringtiefe auf 15 mm begrenzt.
ARTEMIS: Auf dem THW-Testgelände in Hoya
SpaceBOT Camp 2015

Vollautonomer Lauf des ARTEMIS Rovers beim SpaceBot Camp 2015
ARTEMIS Rover: Gesamtübersicht

Gesamtübersicht über den Lauf des Teams ARTEMIS.
ARTEMIS Rover: Mobilität

Mobilität des ARTEMIS Rovers.
HySociaTea: Ausgewählte Highlights der finalen Projektdemo

Dieses Video zeigt ausgewählte Technologien im HySociaTea-Szenario: das Resourcenplanungsmodul, die Objekterkennung anhand der Eyetracker-Information beim Werker, die Sprach-Interaktion mit den Robotern und dem virtuellen Charakter Gloria, die autonomen Sequenzen der Roboter und die autonome Roboter-Roboter Interaktion.
HySociaTea: Autonome Roboter-Roboter Kollaboration zwischen Compi und AILA

Das Video zeigt die autonome Roboter-Roboter Kollaboration in HySociaTea unter Nutzung des TECS-Framework. Der Roboter Compi nimmt das Werkstück und meldet, dass eine Abholung nötig wird. AILA erkennt, dass sie diese Aufgabe ausführen kann und übernimmt. Bei der Übergabe gibt es ein Kommunikationsprotokoll zwischen beiden Robotern.